
Gestion, surveillance et mise à jour du noyau
Guide de gestion du noyau Linux sur Red Hat Enterprise Linux 9
Résumé
Rendre l'open source plus inclusif
Red Hat s'engage à remplacer les termes problématiques dans son code, sa documentation et ses propriétés Web. Nous commençons par ces quatre termes : master, slave, blacklist et whitelist. En raison de l'ampleur de cette entreprise, ces changements seront mis en œuvre progressivement au cours de plusieurs versions à venir. Pour plus de détails, voir le message de notre directeur technique Chris Wright.
Fournir un retour d'information sur la documentation de Red Hat
Nous apprécions vos commentaires sur notre documentation. Faites-nous savoir comment nous pouvons l'améliorer.
Soumettre des commentaires sur des passages spécifiques
- Consultez la documentation au format Multi-page HTML et assurez-vous que le bouton Feedback apparaît dans le coin supérieur droit après le chargement complet de la page.
- Utilisez votre curseur pour mettre en évidence la partie du texte que vous souhaitez commenter.
- Cliquez sur le bouton Add Feedback qui apparaît près du texte en surbrillance.
- Ajoutez vos commentaires et cliquez sur Submit.
Soumettre des commentaires via Bugzilla (compte requis)
- Connectez-vous au site Web de Bugzilla.
- Sélectionnez la version correcte dans le menu Version.
- Saisissez un titre descriptif dans le champ Summary.
- Saisissez votre suggestion d'amélioration dans le champ Description. Incluez des liens vers les parties pertinentes de la documentation.
- Cliquez sur Submit Bug.
Chapitre 1. Le noyau Linux
Découvrez le noyau Linux et le paquetage RPM du noyau Linux fourni et maintenu par Red Hat (Red Hat kernel). Maintenir le noyau Red Hat à jour, ce qui garantit que le système d'exploitation dispose de toutes les dernières corrections de bogues, améliorations de performances et correctifs, et qu'il est compatible avec le nouveau matériel.
1.1. Ce qu'est le noyau
Le noyau est une partie centrale du système d'exploitation Linux qui gère les ressources du système et fournit une interface entre le matériel et les applications logicielles. Le noyau Red Hat est un noyau personnalisé basé sur le noyau Linux principal en amont, que les ingénieurs de Red Hat développent et renforcent en mettant l'accent sur la stabilité et la compatibilité avec les technologies et le matériel les plus récents.
Avant que Red Hat ne publie une nouvelle version du noyau, celui-ci doit passer un ensemble de tests d'assurance qualité rigoureux.
Les noyaux Red Hat sont empaquetés au format RPM afin d'être facilement mis à niveau et vérifiés par le dnf gestionnaire de paquets.
Les noyaux qui n'ont pas été compilés par Red Hat sont not pris en charge par Red Hat.
1.2. Paquets RPM
Un paquetage RPM est un fichier contenant d'autres fichiers et leurs métadonnées (informations sur les fichiers nécessaires au système).
Plus précisément, un paquetage RPM se compose de l'archive cpio.
L'archive cpio contient :
- Dossiers
En-tête RPM (métadonnées du paquet)
Le gestionnaire de paquets
rpmutilise ces métadonnées pour déterminer les dépendances, l'endroit où installer les fichiers et d'autres informations.
Types de paquets RPM
Il existe deux types de paquets RPM. Les deux types partagent le format de fichier et l'outillage, mais ont des contenus différents et servent des objectifs différents :
Source RPM (SRPM)
Un SRPM contient le code source et un fichier SPEC, qui décrit comment construire le code source en un RPM binaire. En option, les correctifs du code source sont également inclus.
RPM binaire
Un RPM binaire contient les binaires construits à partir des sources et des correctifs.
1.3. Aperçu des paquets RPM du noyau Linux
Le RPM kernel est un méta-paquet qui ne contient aucun fichier, mais qui s'assure que les sous-paquets suivants sont correctement installés :
-
kernel-core- contient l'image binaire du noyau Linux (vmlinuz). -
kernel-modules-core- contient les modules de base du noyau pour assurer la fonctionnalité de base. Il s'agit des modules essentiels au bon fonctionnement du matériel le plus couramment utilisé. -
kernel-modules- contient les modules restants du noyau qui ne sont pas présents danskernel-core.
Les sous-paquets kernel-core et kernel-modules-core peuvent être utilisés dans des environnements virtualisés et en nuage pour fournir un noyau RHEL 9 avec un temps de démarrage rapide et un faible encombrement sur le disque. Le sous-paquet kernel-modules n'est généralement pas nécessaire pour de tels déploiements.
Les paquets optionnels du noyau sont par exemple
-
kernel-modules-extra- contient des modules de noyau pour du matériel rare et des modules dont le chargement est désactivé par défaut. -
kernel-debug- contient un noyau avec de nombreuses options de débogage activées pour le diagnostic du noyau, au détriment des performances. -
kernel-tools- contient des outils pour manipuler le noyau Linux et de la documentation. -
kernel-devel- contient les en-têtes du noyau et les fichiers makefiles nécessaires à la construction de modules à partir du paquetagekernel. -
kernel-abi-stablelists- contient des informations relatives à l'ABI du noyau RHEL, notamment une liste des symboles du noyau qui sont nécessaires aux modules externes du noyau Linux et un plug-indnfpour faciliter la mise en œuvre. -
kernel-headers- comprend les fichiers d'en-tête C qui spécifient l'interface entre le noyau Linux et les bibliothèques et programmes de l'espace utilisateur. Les fichiers d'en-tête définissent les structures et les constantes nécessaires à la construction de la plupart des programmes standard. kernel-uki-virt- contient l'image unifiée du noyau (UKI) du noyau RHEL. L'UKI combine le noyau Linux,initramfs, et la ligne de commande du noyau en un seul binaire signé qui peut être démarré directement à partir du firmaware UEFI.kernel-uki-virtcontient les modules du noyau nécessaires pour fonctionner dans des environnements virtualisés et en nuage et peut être utilisé à la place du sous-paquetkernel-core.Importantkernel-uki-virtest fourni en tant qu'aperçu technologique dans RHEL 9.2.
Ressources supplémentaires
1.4. Affichage du contenu du paquetage du noyau
Affichez le contenu du paquet du noyau et de ses sous-paquets sans les installer à l'aide de la commande rpm.
Conditions préalables
-
Obtenu les paquets RPM
kernel,kernel-core,kernel-modules,kernel-modules-extrapour l'architecture de votre processeur
Procédure
Liste des modules pour
kernel:$ rpm -qlp <kernel_rpm>(contains no files) …-
Liste des modules pour
kernel-core:
$ rpm -qlp <kernel-core_rpm>
…
/lib/modules/5.14.0-1.el9.x86_64/kernel/fs/udf/udf.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/fs/xfs
/lib/modules/5.14.0-1.el9.x86_64/kernel/fs/xfs/xfs.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/kernel
/lib/modules/5.14.0-1.el9.x86_64/kernel/kernel/trace
/lib/modules/5.14.0-1.el9.x86_64/kernel/kernel/trace/ring_buffer_benchmark.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/lib
/lib/modules/5.14.0-1.el9.x86_64/kernel/lib/cordic.ko.xz
…-
Liste des modules pour
kernel-modules:
$ rpm -qlp <kernel-modules_rpm>
…
/lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/infiniband/hw/mlx4/mlx4_ib.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/infiniband/hw/mlx5/mlx5_ib.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/infiniband/hw/qedr/qedr.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/infiniband/hw/usnic/usnic_verbs.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/infiniband/hw/vmw_pvrdma/vmw_pvrdma.ko.xz
…-
Liste des modules pour
kernel-modules-extra:
$ rpm -qlp <kernel-modules-extra_rpm>
…
/lib/modules/5.14.0-1.el9.x86_64/extra/net/sched/sch_cbq.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/extra/net/sched/sch_choke.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/extra/net/sched/sch_drr.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/extra/net/sched/sch_dsmark.ko.xz
/lib/modules/5.14.0-1.el9.x86_64/extra/net/sched/sch_gred.ko.xz
…Ressources supplémentaires
-
La page du manuel
rpm(8) - Paquets RPM
1.5. Mise à jour du noyau
Mettez à jour le noyau en utilisant le gestionnaire de paquets dnf le gestionnaire de paquets.
Procédure
Pour mettre à jour le noyau, entrez la commande suivante :
# dnf update kernelCette commande met à jour le noyau ainsi que toutes les dépendances vers la dernière version disponible.
- Redémarrez votre système pour que les modifications soient prises en compte.
Ressources supplémentaires
- gestionnaire de paquets
-
La page du manuel
dnf(8)
1.6. Installation de versions spécifiques du noyau
Installez de nouveaux noyaux à l'aide du dnf gestionnaire de paquets.
Procédure
Pour installer une version spécifique du noyau, entrez la commande suivante :
# dnf install kernel-{version}
Ressources supplémentaires
Chapitre 2. Gestion des modules du noyau
Découvrez les modules du noyau, comment afficher leurs informations et comment effectuer des tâches administratives de base avec les modules du noyau.
2.1. Introduction aux modules du noyau
Le noyau de Red Hat Enterprise Linux peut être étendu avec des éléments optionnels et supplémentaires de fonctionnalité, appelés modules de noyau, sans avoir à redémarrer le système. Sur Red Hat Enterprise Linux 9, les modules du noyau sont des codes supplémentaires du noyau qui sont intégrés dans des fichiers objets compressés <KERNEL_MODULE_NAME>.ko.xz.
Les fonctionnalités les plus courantes permises par les modules du noyau sont les suivantes :
- Pilote de périphérique qui ajoute la prise en charge d'un nouveau matériel
-
Prise en charge d'un système de fichiers tel que
GFS2ouNFS - Appels système
Sur les systèmes modernes, les modules du noyau sont automatiquement chargés en cas de besoin. Toutefois, dans certains cas, il est nécessaire de charger ou de décharger les modules manuellement.
Comme le noyau lui-même, les modules peuvent prendre des paramètres qui personnalisent leur comportement si nécessaire.
Des outils sont fournis pour vérifier quels modules sont en cours d'exécution, quels modules sont disponibles pour être chargés dans le noyau et quels sont les paramètres acceptés par un module. L'outil fournit également un mécanisme pour charger et décharger les modules du noyau dans le noyau en cours d'exécution.
2.2. Dépendances du module du noyau
Certains modules du noyau dépendent parfois d'un ou de plusieurs autres modules du noyau. Le fichier /lib/modules/<KERNEL_VERSION>/modules.dep contient une liste complète des dépendances des modules du noyau pour la version respective du noyau.
depmod
Le fichier de dépendances est généré par le programme depmod, qui fait partie du paquetage kmod. De nombreux utilitaires fournis par kmod prennent en compte les dépendances des modules lors de l'exécution des opérations, de sorte que le suivi des dépendances de manual est rarement nécessaire.
Le code des modules du noyau est exécuté dans l'espace du noyau en mode non restreint. Pour cette raison, vous devez faire attention aux modules que vous chargez.
weak-modules
En plus de depmod, Red Hat Enterprise Linux fournit le script weak-modules livré également avec le paquetage kmod. weak-modules détermine quels modules sont compatibles kABI avec les noyaux installés. Lors de la vérification de la compatibilité des modules avec le noyau, weak-modules traite les dépendances des symboles des modules de la version supérieure à la version inférieure du noyau pour lequel ils ont été construits. Cela signifie que weak-modules traite chaque module indépendamment de la version du noyau pour lequel il a été construit.
Ressources supplémentaires
-
La page du manuel
modules.dep(5) -
La page du manuel
depmod(8) - Quel est l'objectif du script weak-modules fourni avec Red Hat Enterprise Linux ?
- Qu'est-ce que l'interface binaire d'application du noyau (kABI) ?
2.3. Liste des modules du noyau installés
La commande grubby --info=ALL affiche une liste indexée des noyaux installés sur les installations !BLS et BLS.
Procédure
Lister les noyaux installés à l'aide de la commande suivante :
# grubby --info=ALL | grep titleLa liste de tous les noyaux installés s'affiche comme suit :
title="Red Hat Enterprise Linux (5.14.0-1.el9.x86_64) 9.0 (Plow)" title="Red Hat Enterprise Linux (0-rescue-0d772916a9724907a5d1350bcd39ac92) 9.0 (Plow)"
L'exemple ci-dessus affiche la liste des noyaux installés de grubby-8.40-17, à partir du menu GRUB.
2.4. Liste des modules du noyau actuellement chargés
Affiche les modules du noyau actuellement chargés.
Conditions préalables
-
Le paquet
kmodest installé.
Procédure
Pour obtenir la liste de tous les modules du noyau actuellement chargés, entrez :
$ lsmod Module Size Used by fuse 126976 3 uinput 20480 1 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 xt_conntrack 16384 1 ipt_REJECT 16384 1 nft_counter 16384 16 nf_nat_tftp 16384 0 nf_conntrack_tftp 16384 1 nf_nat_tftp tun 49152 1 bridge 192512 0 stp 16384 1 bridge llc 16384 2 bridge,stp nf_tables_set 32768 5 nft_fib_inet 16384 1 …Dans l'exemple ci-dessus :
- La première colonne fournit l'adresse names des modules actuellement chargés.
- La deuxième colonne indique la quantité de memory par module en kilo-octets.
- La dernière colonne indique le nombre et, éventuellement, les noms des modules qui sont dependent sur un module particulier.
Ressources supplémentaires
-
Le fichier
/usr/share/doc/kmod/README -
La page du manuel
lsmod(8)
2.5. Définition d'un noyau par défaut
Définir un noyau spécifique par défaut à l'aide de l'outil de ligne de commande grubby et de GRUB.
Procédure
Définition du noyau par défaut, à l'aide de l'outil
grubbyEntrez la commande suivante pour définir le noyau par défaut à l'aide de l'outil
grubby:# grubby --set-default $kernel_pathLa commande utilise comme argument un identifiant de machine sans le suffixe
.conf.NoteL'identifiant de la machine se trouve dans le répertoire
/boot/loader/entries/.
Définir le noyau par défaut, en utilisant l'argument
idLister les entrées de démarrage à l'aide de l'argument
id, puis définir un noyau par défaut :# grubby --info ALL | grep id # grubby --set-default /boot/vmlinuz-<version>.<architecture>
NotePour dresser la liste des entrées de démarrage à l'aide de l'argument
title, exécutez la commande# grubby --info=ALL | grep titlecommande.
Définition du noyau par défaut uniquement pour le prochain démarrage
Exécutez la commande suivante pour définir le noyau par défaut uniquement pour le prochain redémarrage à l'aide de la commande
grub2-reboot:# grub2-reboot <index|title|id>AvertissementDéfinissez le noyau par défaut uniquement pour le prochain démarrage avec précaution. L'installation de nouveaux RPM de noyaux, de noyaux auto-construits et l'ajout manuel d'entrées dans le répertoire
/boot/loader/entries/peuvent modifier les valeurs de l'index.
2.6. Affichage d'informations sur les modules du noyau
La commande modinfo permet d'afficher des informations détaillées sur le module du noyau spécifié.
Conditions préalables
-
Le paquet
kmodest installé.
Procédure
Pour afficher des informations sur n'importe quel module du noyau, entrez :
$ modinfo <KERNEL_MODULE_NAME>Par exemple :
$ modinfo virtio_net filename: /lib/modules/5.14.0-1.el9.x86_64/kernel/drivers/net/virtio_net.ko.xz license: GPL description: Virtio network driver rhelversion: 9.0 srcversion: 8809CDDBE7202A1B00B9F1C alias: virtio:d00000001v* depends: net_failover retpoline: Y intree: Y name: virtio_net vermagic: 5.14.0-1.el9.x86_64 SMP mod_unload modversions … parm: napi_weight:int parm: csum:bool parm: gso:bool parm: napi_tx:boolVous pouvez demander des informations sur tous les modules disponibles, qu'ils soient chargés ou non. Les entrées du site
parmindiquent les paramètres que l'utilisateur peut définir pour le module et le type de valeur qu'il attend.NoteLorsque vous saisissez le nom d'un module du noyau, n'ajoutez pas l'extension
.ko.xzà la fin du nom. Les noms des modules du noyau n'ont pas d'extension, mais les fichiers correspondants en ont une.
Ressources supplémentaires
-
La page du manuel
modinfo(8)
2.7. Chargement des modules du noyau au moment de l'exécution du système
La meilleure façon d'étendre les fonctionnalités du noyau Linux est de charger des modules de noyau. Utilisez la commande modprobe pour trouver et charger un module de noyau dans le noyau en cours d'exécution.
Conditions préalables
- Autorisations de la racine
-
Le paquet
kmodest installé. - Le module du noyau concerné n'est pas chargé. Pour s'en assurer, il convient de dresser la liste des modules du noyau chargés.
Procédure
Sélectionnez le module du noyau que vous souhaitez charger.
Les modules sont situés dans le répertoire
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/.Charger le module du noyau concerné :
# modprobe <MODULE_NAME>NoteLorsque vous saisissez le nom d'un module du noyau, n'ajoutez pas l'extension
.ko.xzà la fin du nom. Les noms des modules du noyau n'ont pas d'extension, mais les fichiers correspondants en ont une.En option, vérifier que le module concerné a été chargé :
$ lsmod | grep <MODULE_NAME>Si le module a été correctement chargé, cette commande affiche le module du noyau correspondant. Par exemple :
$ lsmod | grep serio_raw serio_raw 16384 0
Les modifications décrites dans cette procédure will not persist sont effectuées après le redémarrage du système. Pour plus d'informations sur le chargement des modules du noyau à l'adresse persist lors des redémarrages du système, voir Chargement automatique des modules du noyau au démarrage du système.
Ressources supplémentaires
-
La page du manuel
modprobe(8)
2.8. Déchargement des modules du noyau au moment de l'exécution du système
Il arrive parfois que vous deviez décharger certains modules du noyau en cours d'exécution. Utilisez la commande modprobe pour trouver et décharger un module du noyau au moment de l'exécution du système à partir du noyau actuellement chargé.
Conditions préalables
- Autorisations de la racine
-
Le paquet
kmodest installé.
Procédure
Entrez la commande
lsmodet sélectionnez un module du noyau que vous souhaitez décharger.Si un module du noyau a des dépendances, déchargez-les avant de décharger le module du noyau. Pour plus de détails sur l'identification des modules ayant des dépendances, voir Lister les modules du noyau actuellement chargés et Dépendances des modules du noyau.
Décharger le module du noyau concerné :
# modprobe -r <MODULE_NAME>Lorsque vous saisissez le nom d'un module du noyau, n'ajoutez pas l'extension
.ko.xzà la fin du nom. Les noms des modules du noyau n'ont pas d'extension, mais les fichiers correspondants en ont une.AvertissementNe pas décharger les modules du noyau lorsqu'ils sont utilisés par le système en cours d'exécution. Cela peut conduire à un système instable ou non opérationnel.
Optionnellement, vérifier que le module concerné a été déchargé :
$ lsmod | grep <MODULE_NAME>Si le module a été déchargé avec succès, cette commande n'affiche aucun résultat.
Une fois cette procédure terminée, les modules du noyau qui sont définis pour être automatiquement chargés au démarrage, will not stay unloaded après le redémarrage du système. Pour plus d'informations sur la manière d'éviter ce résultat, voir Empêcher le chargement automatique des modules du noyau au moment du démarrage du système.
Ressources supplémentaires
-
modprobe(8)page du manuel
2.9. Déchargement des modules du noyau aux premiers stades du processus de démarrage
Dans certaines situations, il est nécessaire de décharger un module du noyau très tôt dans le processus de démarrage. Par exemple, lorsque le module du noyau contient un code qui rend le système insensible et que l'utilisateur n'est pas en mesure d'atteindre le stade de désactivation permanente du module du noyau. Dans ce cas, il est possible de bloquer temporairement le chargement du module du noyau à l'aide d'un chargeur de démarrage.
Les modifications décrites dans cette procédure will not persist sont appliquées après le prochain redémarrage. Pour plus d'informations sur la manière d'ajouter un module de noyau à une liste de refus afin qu'il ne soit pas automatiquement chargé au cours du processus de démarrage, voir Empêcher le chargement automatique des modules de noyau au moment du démarrage du système.
Conditions préalables
- Vous disposez d'un module de noyau chargeable, dont vous voulez empêcher le chargement pour une raison quelconque.
Procédure
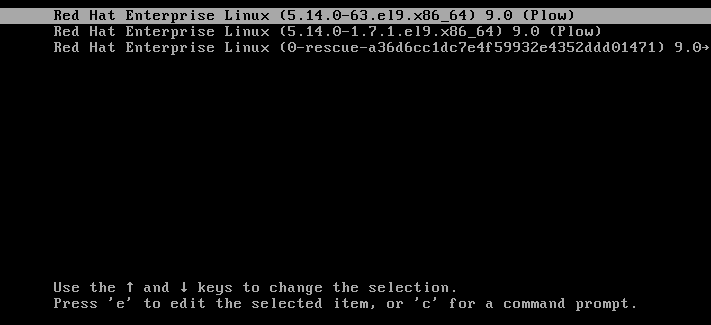
Modifiez l'entrée correspondante du chargeur de démarrage pour décharger le module de noyau souhaité avant que la séquence de démarrage ne se poursuive.
- Utilisez les touches du curseur pour mettre en évidence l'entrée du chargeur de démarrage concerné.
Appuyez sur la touche pour modifier l'entrée.
Figure 2.1. Menu de démarrage du noyau
- Utilisez les touches du curseur pour naviguer jusqu'à la ligne qui commence par linux.
Ajouter
modprobe.blacklist=module_nameà la fin de la ligne.Figure 2.2. Entrée de démarrage du noyau
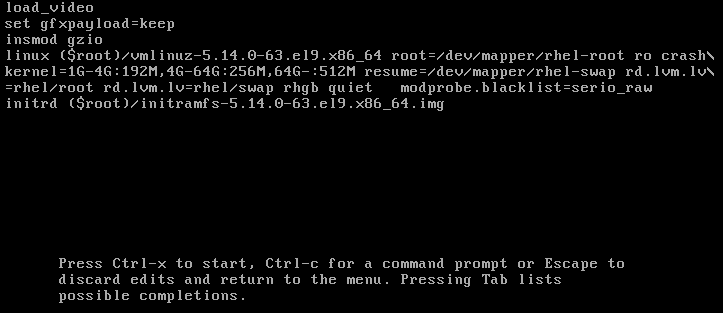
Le module du noyau
serio_rawillustre un module malveillant qui doit être déchargé au début du processus d'amorçage.- Appuyez sur les touches pour démarrer en utilisant la configuration modifiée.
Vérification
Une fois que le système a complètement démarré, vérifiez que le module du noyau concerné n'est pas chargé.
# lsmod | grep serio_raw
Ressources supplémentaires
2.10. Chargement automatique des modules du noyau au démarrage du système
Configurer un module du noyau pour qu'il soit chargé automatiquement pendant le processus de démarrage.
Conditions préalables
- Autorisations de la racine
-
Le paquet
kmodest installé.
Procédure
Sélectionnez un module du noyau que vous souhaitez charger pendant le processus de démarrage.
Les modules sont situés dans le répertoire
/lib/modules/$(uname -r)/kernel/<SUBSYSTEM>/.Créer un fichier de configuration pour le module :
# echo <MODULE_NAME> > /etc/modules-load.d/<MODULE_NAME>.confNoteLorsque vous saisissez le nom d'un module du noyau, n'ajoutez pas l'extension
.ko.xzà la fin du nom. Les noms des modules du noyau n'ont pas d'extension, mais les fichiers correspondants en ont une.En option, après le redémarrage, vérifiez que le module concerné a été chargé :
$ lsmod | grep <MODULE_NAME>L'exemple de commande ci-dessus devrait réussir et afficher le module du noyau concerné.
Les changements décrits dans cette procédure will persist après le redémarrage du système.
Ressources supplémentaires
-
modules-load.d(5)page du manuel
2.11. Empêcher le chargement automatique des modules du noyau au démarrage du système
Ajouter un module du noyau à une liste de refus afin qu'il ne soit pas automatiquement chargé pendant le processus de démarrage.
Conditions préalables
- Autorisations de la racine
-
Le paquet
kmodest installé. - Assurez-vous qu'un module du noyau figurant dans une liste de refus n'est pas vital pour la configuration actuelle de votre système.
Procédure
Sélectionnez un module du noyau que vous souhaitez placer dans une liste de refus :
$ lsmod Module Size Used by fuse 126976 3 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 uinput 20480 1 xt_conntrack 16384 1 …La commande
lsmodaffiche une liste des modules chargés dans le noyau en cours d'exécution.Vous pouvez également identifier un module du noyau non chargé que vous souhaitez empêcher de se charger.
Tous les modules du noyau sont situés dans le répertoire
/lib/modules/<KERNEL_VERSION>/kernel/<SUBSYSTEM>/.
Créer un fichier de configuration pour une liste de deniers :
# vim /etc/modprobe.d/blacklist.conf # Blacklists <KERNEL_MODULE_1> blacklist <MODULE_NAME_1> install <MODULE_NAME_1> /bin/false # Blacklists <KERNEL_MODULE_2> blacklist <MODULE_NAME_2> install <MODULE_NAME_2> /bin/false # Blacklists <KERNEL_MODULE_n> blacklist <MODULE_NAME_n> install <MODULE_NAME_n> /bin/false …
L'exemple montre le contenu du fichier
blacklist.conf, édité par l'éditeurvim. La ligneblacklistgarantit que le module du noyau concerné ne sera pas automatiquement chargé pendant le processus de démarrage. La commandeblacklist, cependant, n'empêche pas le module d'être chargé en tant que dépendance d'un autre module du noyau qui n'est pas dans une liste de dénylage. Par conséquent, la ligneinstallentraîne l'exécution de la commande/bin/falseau lieu de l'installation d'un module.Les lignes commençant par un signe dièse sont des commentaires destinés à rendre le fichier plus lisible.
NoteLorsque vous saisissez le nom d'un module du noyau, n'ajoutez pas l'extension
.ko.xzà la fin du nom. Les noms des modules du noyau n'ont pas d'extension, mais les fichiers correspondants en ont une.Créez une copie de sauvegarde de l'image ramdisk initiale actuelle avant de la reconstruire :
# cp /boot/initramfs-$(uname -r).img /boot/initramfs-$(uname -r).bak.$(date %m-\r%H%M%S).imgLa commande ci-dessus crée une image de sauvegarde
initramfsau cas où la nouvelle version aurait un problème inattendu.Vous pouvez également créer une copie de sauvegarde d'une autre image initiale de ramdisk qui correspond à la version du noyau pour laquelle vous souhaitez placer des modules de noyau dans une liste de dénombrement :
# cp /boot/initramfs-<SOME_VERSION>.img /boot/initramfs-<SOME_VERSION>.img.bak.$(date %m-\r%H%M%S)
Générer une nouvelle image ramdisk initiale pour refléter les changements :
# dracut -f -vSi vous construisez une image initiale de ramdisk pour une version de noyau différente de celle dans laquelle vous êtes actuellement démarré, indiquez à la fois la cible
initramfset la version du noyau :# dracut -f -v /boot/initramfs-<TARGET_VERSION>.img <CORRESPONDING_TARGET_KERNEL_VERSION>
Redémarrer le système :
$ reboot
Les changements décrits dans cette procédure will take effect and persist après le redémarrage du système. Si vous placez incorrectement un module clé du noyau dans une liste de refus, vous risquez d'avoir un système instable ou non opérationnel.
Ressources supplémentaires
- Comment empêcher le chargement automatique d'un module du noyau ?
-
dracut(8)page du manuel
2.12. Compilation de modules de noyau personnalisés
Vous pouvez créer un module de noyau d'échantillonnage en fonction des différentes configurations matérielles et logicielles.
Conditions préalables
Vous avez installé les paquets
kernel-devel,gccetelfutils-libelf-devel.# dnf install kernel-devel-$(uname -r) gcc elfutils-libelf-devel
- Vous disposez des droits d'accès à la racine.
-
Vous avez créé le répertoire
/root/testmodule/dans lequel vous compilez le module de noyau personnalisé.
Procédure
Créez le fichier
/root/testmodule/test.cavec le contenu suivant.#include <linux/module.h> #include <linux/kernel.h> int init_module(void) { printk("Hello World\n This is a test\n"); return 0; } void cleanup_module(void) { printk("Good Bye World"); } MODULE_LICENSE("GPL");Le fichier
test.cest un fichier source qui fournit les principales fonctionnalités du module du noyau. Le fichier a été créé dans un répertoire/root/testmodule/dédié à des fins d'organisation. Après la compilation du module, le répertoire/root/testmodule/contiendra plusieurs fichiers.Le fichier
test.cinclut les bibliothèques du système :-
Le fichier d'en-tête
linux/kernel.hest nécessaire pour la fonctionprintk()dans le code d'exemple. Le fichier
linux/module.hcontient des déclarations de fonctions et des définitions de macros à partager entre plusieurs fichiers sources écrits en langage de programmation C.Suivez ensuite les fonctions
init_module()etcleanup_module()pour démarrer et terminer la fonction d'enregistrement du noyauprintk(), qui imprime du texte.
-
Le fichier d'en-tête
Créez le fichier
/root/testmodule/Makefileavec le contenu suivant.obj-m := test.o
Le Makefile contient des instructions selon lesquelles le compilateur doit produire un fichier objet spécifiquement nommé
test.o. La directiveobj-mspécifie que le fichiertest.korésultant sera compilé en tant que module de noyau chargeable. Alternativement, la directiveobj-yindiquerait de compilertest.koen tant que module de noyau intégré.Compiler le module du noyau.
# make -C /lib/modules/$(uname -r)/build M=/root/testmodule modules make: Entering directory '/usr/src/kernels/5.14.0-70.17.1.el9_0.x86_64' CC [M] /root/testmodule/test.o MODPOST /root/testmodule/Module.symvers CC [M] /root/testmodule/test.mod.o LD [M] /root/testmodule/test.ko BTF [M] /root/testmodule/test.ko Skipping BTF generation for /root/testmodule/test.ko due to unavailability of vmlinux make: Leaving directory '/usr/src/kernels/5.14.0-70.17.1.el9_0.x86_64'Le compilateur crée un fichier objet (
test.o) pour chaque fichier source (test.c) en tant qu'étape intermédiaire avant de les lier ensemble dans le module final du noyau (test.ko).Après une compilation réussie,
/root/testmodule/contient des fichiers supplémentaires relatifs au module de noyau personnalisé compilé. Le module compilé lui-même est représenté par le fichiertest.ko.
Vérification
Facultatif : vérifiez le contenu du répertoire
/root/testmodule/:# ls -l /root/testmodule/ total 152 -rw-r—r--. 1 root root 16 Jul 26 08:19 Makefile -rw-r—r--. 1 root root 25 Jul 26 08:20 modules.order -rw-r—r--. 1 root root 0 Jul 26 08:20 Module.symvers -rw-r—r--. 1 root root 224 Jul 26 08:18 test.c -rw-r—r--. 1 root root 62176 Jul 26 08:20 test.ko -rw-r—r--. 1 root root 25 Jul 26 08:20 test.mod -rw-r—r--. 1 root root 849 Jul 26 08:20 test.mod.c -rw-r—r--. 1 root root 50936 Jul 26 08:20 test.mod.o -rw-r—r--. 1 root root 12912 Jul 26 08:20 test.oCopiez le module du noyau dans le répertoire
/lib/modules/$(uname -r)/:# cp /root/testmodule/test.ko /lib/modules/$(uname -r)/Mise à jour de la liste des dépendances modulaires :
# depmod -aCharger le module du noyau :
# modprobe -v test insmod /lib/modules/5.14.0-1.el9.x86_64/test.ko
Vérifiez que le module du noyau a été chargé avec succès :
# lsmod | grep test test 16384 0Lire les derniers messages du tampon circulaire du noyau :
# dmesg [74422.545004] Hello World This is a test
Ressources supplémentaires
Chapitre 3. Signer un noyau et des modules pour le démarrage sécurisé
Vous pouvez renforcer la sécurité de votre système en utilisant un noyau et des modules de noyau signés. Sur les systèmes de construction basés sur l'UEFI où Secure Boot est activé, vous pouvez signer vous-même un noyau ou des modules de noyau construits de manière privée. En outre, vous pouvez importer votre clé publique dans un système cible où vous souhaitez déployer votre noyau ou vos modules de noyau.
Si l'option Secure Boot est activée, tous les composants suivants doivent être signés à l'aide d'une clé privée et authentifiés à l'aide de la clé publique correspondante :
- Chargeur de démarrage du système d'exploitation UEFI
- Le noyau Red Hat Enterprise Linux
- Tous les modules du noyau
Si l'un de ces composants n'est pas signé et authentifié, le système ne peut pas terminer le processus de démarrage.
Red Hat Enterprise Linux 9 comprend :
- Chargeurs de démarrage signés
- Noyaux signés
- Modules signés du noyau
De plus, le chargeur de démarrage de première étape signé et le noyau signé incluent des clés publiques Red Hat intégrées. Ces binaires exécutables signés et ces clés intégrées permettent à Red Hat Enterprise Linux 9 de s'installer, de démarrer et de s'exécuter avec les clés de l'autorité de certification Microsoft UEFI Secure Boot qui sont fournies par le microprogramme UEFI sur les systèmes qui prennent en charge UEFI Secure Boot.
- Tous les systèmes basés sur l'UEFI ne prennent pas en charge le démarrage sécurisé.
- Le système de construction, dans lequel vous construisez et signez votre module de noyau, n'a pas besoin d'activer le Secure Boot UEFI ni même d'être un système basé sur l'UEFI.
3.1. Conditions préalables
Pour pouvoir signer les modules du noyau construits en externe, installez les utilitaires des paquets suivants :
# dnf install pesign openssl kernel-devel mokutil keyutilsTableau 3.1. Services publics requis
Utilité Fourni par paquet Utilisé le Objectif efikeygenpesignSystème de construction
Génère des paires de clés X.509 publiques et privées
opensslopensslSystème de construction
Exporte la clé privée non chiffrée
sign-filekernel-develSystème de construction
Fichier exécutable utilisé pour signer un module du noyau avec la clé privée
mokutilmokutilSystème cible
Utilitaire facultatif utilisé pour enregistrer manuellement la clé publique
keyctlkeyutilsSystème cible
Utilitaire facultatif utilisé pour afficher les clés publiques dans le trousseau de clés du système
3.2. Comprendre le démarrage sécurisé de l'UEFI
La technologie Secure Boot de Unified Extensible Firmware Interface (UEFI) permet d'empêcher l'exécution du code de l'espace noyau qui n'a pas été signé par une clé de confiance. Le chargeur de démarrage du système est signé par une clé cryptographique. La base de données des clés publiques, qui est contenue dans le microprogramme, autorise la clé de signature. Vous pouvez ensuite vérifier une signature dans le chargeur de démarrage de l'étape suivante et dans le noyau.
L'UEFI Secure Boot établit une chaîne de confiance entre le microprogramme et les pilotes et modules du noyau signés, comme suit :
-
Une clé privée UEFI signe et une clé publique authentifie le chargeur de démarrage de première étape
shim. Un certificate authority (CA) signe à son tour la clé publique. L'autorité de certification est stockée dans la base de données du microprogramme. -
Le fichier
shimcontient la clé publique de Red Hat Red Hat Secure Boot (CA key 1) pour authentifier le chargeur de démarrage GRUB et le noyau. - Le noyau contient quant à lui des clés publiques pour authentifier les pilotes et les modules.
Secure Boot est le composant de validation du chemin de démarrage de la spécification UEFI. La spécification définit :
- Interface de programmation pour les variables UEFI protégées cryptographiquement dans une mémoire non volatile.
- Stockage des certificats racine X.509 de confiance dans les variables UEFI.
- Validation des applications UEFI telles que les chargeurs de démarrage et les pilotes.
- Procédures de révocation des certificats et des hachages d'applications connus comme mauvais.
L'UEFI Secure Boot permet de détecter les modifications non autorisées, mais ne permet pas d'accéder au site not:
- Empêcher l'installation ou la suppression des chargeurs de démarrage de deuxième niveau.
- Exiger une confirmation explicite de ces modifications par l'utilisateur.
- Arrêter les manipulations du chemin d'amorçage. Les signatures sont vérifiées lors du démarrage, et non lors de l'installation ou de la mise à jour du chargeur de démarrage.
Si le chargeur de démarrage ou le noyau ne sont pas signés par une clé de confiance du système, Secure Boot les empêche de démarrer.
3.3. Prise en charge de l'UEFI Secure Boot
Vous pouvez installer et exécuter Red Hat Enterprise Linux 9 sur des systèmes avec UEFI Secure Boot activé si le noyau et tous les pilotes chargés sont signés avec une clé de confiance. Red Hat fournit des noyaux et des pilotes qui sont signés et authentifiés par les clés Red Hat appropriées.
Si vous souhaitez charger des noyaux ou des pilotes construits en externe, vous devez également les signer.
Restrictions imposées par UEFI Secure Boot
- Le système n'exécute le code en mode noyau que lorsque sa signature a été correctement authentifiée.
- Le chargement du module GRUB est désactivé parce qu'il n'existe pas d'infrastructure pour la signature et la vérification des modules GRUB. Leur chargement constitue l'exécution d'un code non fiable à l'intérieur du périmètre de sécurité défini par Secure Boot.
- Red Hat fournit un binaire GRUB signé qui contient tous les modules pris en charge sur Red Hat Enterprise Linux 9.
Ressources supplémentaires
3.4. Exigences pour l'authentification des modules du noyau avec des clés X.509
Dans Red Hat Enterprise Linux 9, lorsqu'un module du noyau est chargé, le noyau vérifie la signature du module par rapport aux clés publiques X.509 du trousseau de clés du système du noyau (.builtin_trusted_keys) et du trousseau de clés de la plate-forme du noyau (.platform). Le trousseau .platform contient des clés provenant de fournisseurs de plateformes tiers et des clés publiques personnalisées. Les clés du trousseau du système du noyau .blacklist sont exclues de la vérification.
Certaines conditions doivent être remplies pour charger les modules du noyau sur les systèmes dont la fonctionnalité UEFI Secure Boot est activée :
Si l'UEFI Secure Boot est activé ou si le paramètre
module.sig_enforcekernel a été spécifié :-
Vous ne pouvez charger que les modules signés du noyau dont les signatures ont été authentifiées à l'aide des clés du trousseau de clés du système (
.builtin_trusted_keys) et du trousseau de clés de la plate-forme (.platform). -
La clé publique ne doit pas figurer dans le trousseau des clés révoquées du système (
.blacklist).
-
Vous ne pouvez charger que les modules signés du noyau dont les signatures ont été authentifiées à l'aide des clés du trousseau de clés du système (
Si UEFI Secure Boot est désactivé et que le paramètre
module.sig_enforcekernel n'a pas été spécifié :- Vous pouvez charger des modules de noyau non signés et des modules de noyau signés sans clé publique.
Si le système n'est pas basé sur l'UEFI ou si le Secure Boot de l'UEFI est désactivé :
-
Seules les clés intégrées dans le noyau sont chargées sur
.builtin_trusted_keyset.platform. - Vous n'avez pas la possibilité d'augmenter ce jeu de clés sans reconstruire le noyau.
-
Seules les clés intégrées dans le noyau sont chargées sur
Tableau 3.2. Exigences d'authentification du module du noyau pour le chargement
| Module signé | Clé publique trouvée et signature valide | État de l'UEFI Secure Boot | sig_enforce | Chargement du module | Noyau altéré |
|---|---|---|---|---|---|
| Non signé | - | Non activé | Non activé | Réussite | Oui |
| Non activé | Activé | Échecs | - | ||
| Activé | - | Échecs | - | ||
| Signé | Non | Non activé | Non activé | Réussite | Oui |
| Non activé | Activé | Échecs | - | ||
| Activé | - | Échecs | - | ||
| Signé | Oui | Non activé | Non activé | Réussite | Non |
| Non activé | Activé | Réussite | Non | ||
| Activé | - | Réussite | Non |
3.5. Sources des clés publiques
Lors du démarrage, le noyau charge les clés X.509 à partir d'un ensemble de réserves de clés persistantes dans les trousseaux de clés suivants :
-
Le porte-clés du système (
.builtin_trusted_keys) -
Le porte-clés
.platform -
Le système
.blacklistporte-clés
Tableau 3.3. Sources pour les porte-clés système
| Source des clés X.509 | L'utilisateur peut ajouter des clés | État de l'UEFI Secure Boot | Clés chargées au démarrage |
|---|---|---|---|
| Intégrée dans le noyau | Non | - |
|
|
UEFI | Limitée | Non activé | Non |
| Activé |
| ||
|
Intégrée dans le chargeur de démarrage | Non | Non activé | Non |
| Activé |
| ||
| Liste des clés du propriétaire de la machine (MOK) | Oui | Non activé | Non |
| Activé |
|
.builtin_trusted_keys- Un porte-clés construit sur mesure
- Contient des clés publiques de confiance
-
rootdes privilèges sont nécessaires pour visualiser les clés
.platform- Un porte-clés construit sur mesure
- Contient des clés provenant de fournisseurs de plateformes tiers et des clés publiques personnalisées
-
rootdes privilèges sont nécessaires pour visualiser les clés
.blacklist- Un trousseau de clés X.509 révoquées
-
Un module signé par une clé provenant de
.blacklistéchouera à l'authentification même si votre clé publique se trouve dans.builtin_trusted_keys
- UEFI Secure Boot
db - Une base de données de signatures
- Stocke les clés (hachages) des applications UEFI, des pilotes UEFI et des chargeurs de démarrage
- Les clés peuvent être chargées sur la machine
- UEFI Secure Boot
dbx - Une base de données de signatures révoquées
- Empêche le chargement des clés
-
Les clés révoquées de cette base de données sont ajoutées au trousseau de clés
.blacklist
3.6. Générer une paire de clés publique et privée
Pour utiliser un noyau personnalisé ou des modules de noyau personnalisés sur un système compatible avec Secure Boot, vous devez générer une paire de clés X.509 publique et privée. Vous pouvez utiliser la clé privée générée pour signer le noyau ou les modules du noyau. Vous pouvez également valider le noyau ou les modules signés en ajoutant la clé publique correspondante à la clé du propriétaire de la machine (MOK) pour Secure Boot.
Appliquez des mesures de sécurité et des politiques d'accès strictes pour protéger le contenu de votre clé privée. Entre de mauvaises mains, la clé pourrait être utilisée pour compromettre tout système authentifié par la clé publique correspondante.
Procédure
Créez une paire de clés publiques et privées X.509 :
Si vous souhaitez uniquement signer un noyau personnalisé modules:
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --module \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key'
Si vous souhaitez signer un document personnalisé kernel:
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --kernel \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key'
Lorsque le système RHEL fonctionne en mode FIPS :
# efikeygen --dbdir /etc/pki/pesign \ --self-sign \ --kernel \ --common-name 'CN=Organization signing key' \ --nickname 'Custom Secure Boot key' --token 'pkcs11:token=NSS%20FIPS%20140-2%20Certificate%20DB'
Par défaut, lorsque l'option
--tokenn'est pas spécifiée,pkcs11:token=NSS Certificate DBest utilisé.
Les clés publiques et privées sont maintenant stockées dans le répertoire /etc/pki/pesign/.
C'est une bonne pratique de sécurité de signer le noyau et les modules du noyau pendant la période de validité de sa clé de signature. Cependant, l'utilitaire sign-file ne vous avertit pas et la clé sera utilisable dans Red Hat Enterprise Linux 9 indépendamment des dates de validité.
Ressources supplémentaires
3.7. Exemple de sortie des trousseaux de clés du système
Vous pouvez afficher des informations sur les clés des trousseaux de clés du système à l'aide de l'utilitaire keyctl du paquetage keyutils.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
-
Vous avez installé l'utilitaire
keyctlà partir du paquetagekeyutils.
Exemple 3.1. Sortie de porte-clés
Voici un exemple abrégé de la sortie des trousseaux de clés .builtin_trusted_keys, .platform, et .blacklist d'un système Red Hat Enterprise Linux 9 où l'UEFI Secure Boot est activé.
# keyctl list %:.builtin_trusted_keys 6 keys in keyring: ...asymmetric: Red Hat Enterprise Linux Driver Update Program (key 3): bf57f3e87... ...asymmetric: Red Hat Secure Boot (CA key 1): 4016841644ce3a810408050766e8f8a29... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4309bd82709c8cd54f316ed... ...asymmetric: Microsoft Windows Production PCA 2011: a92902398e16c49778cd90f99e... ...asymmetric: Red Hat Enterprise Linux kernel signing key: 4249689eefc77e95880b... ...asymmetric: Red Hat Enterprise Linux kpatch signing key: 4d38fd864ebe18c5f0b7... # keyctl list %:.platform 4 keys in keyring: ...asymmetric: VMware, Inc.: 4ad8da0472073... ...asymmetric: Red Hat Secure Boot CA 5: cc6fafe72... ...asymmetric: Microsoft Windows Production PCA 2011: a929f298e1... ...asymmetric: Microsoft Corporation UEFI CA 2011: 13adbf4e0bd82... # keyctl list %:.blacklist 4 keys in keyring: ...blacklist: bin:f5ff83a... ...blacklist: bin:0dfdbec... ...blacklist: bin:38f1d22... ...blacklist: bin:51f831f...
Le trousseau .builtin_trusted_keys de l'exemple montre l'ajout de deux clés provenant des clés UEFI Secure Boot db ainsi que de la clé Red Hat Secure Boot (CA key 1), qui est intégrée dans le chargeur de démarrage shim.
Exemple 3.2. Sortie de la console du noyau
L'exemple suivant montre la sortie de la console du noyau. Les messages identifient les clés avec une source liée à l'UEFI Secure Boot. Il s'agit de UEFI Secure Boot db, embedded shim, et MOK list.
# dmesg | egrep 'integrity.*cert'
[1.512966] integrity: Loading X.509 certificate: UEFI:db
[1.513027] integrity: Loaded X.509 cert 'Microsoft Windows Production PCA 2011: a929023...
[1.513028] integrity: Loading X.509 certificate: UEFI:db
[1.513057] integrity: Loaded X.509 cert 'Microsoft Corporation UEFI CA 2011: 13adbf4309...
[1.513298] integrity: Loading X.509 certificate: UEFI:MokListRT (MOKvar table)
[1.513549] integrity: Loaded X.509 cert 'Red Hat Secure Boot CA 5: cc6fa5e72868ba494e93...Ressources supplémentaires
-
keyctl(1),dmesg(1)pages de manuel
3.8. Enregistrement de la clé publique sur le système cible en ajoutant la clé publique à la liste MOK
Vous devez enregistrer votre clé publique sur tous les systèmes où vous souhaitez authentifier et charger votre noyau ou vos modules de noyau. Vous pouvez importer la clé publique sur un système cible de différentes manières afin que le trousseau de clés de la plate-forme (.platform) puisse utiliser la clé publique pour authentifier le noyau ou les modules du noyau.
Lorsque RHEL 9 démarre sur un système basé sur l'UEFI avec Secure Boot activé, le noyau charge sur le trousseau de la plate-forme (.platform) toutes les clés publiques qui se trouvent dans la base de données de clés Secure Boot db. En même temps, le noyau exclut les clés de la base de données dbx des clés révoquées.
Vous pouvez utiliser la fonction de facilité de la clé du propriétaire de la machine (MOK) pour étendre la base de données de clés de l'UEFI Secure Boot. Lorsque RHEL 9 démarre sur un système UEFI avec Secure Boot activé, les clés de la liste MOK sont également ajoutées au trousseau de clés de la plate-forme (.platform) en plus des clés de la base de données de clés. Les clés de la liste MOK sont également stockées de manière persistante et sécurisée de la même manière que les clés de la base de données Secure Boot, mais il s'agit de deux installations distinctes. La fonction MOK est prise en charge par shim, MokManager, GRUB et l'utilitaire mokutil.
Pour faciliter l'authentification de votre module de noyau sur vos systèmes, envisagez de demander à votre fournisseur de système d'incorporer votre clé publique dans la base de données de clés UEFI Secure Boot dans leur image de micrologiciel d'usine.
Conditions préalables
- Vous avez généré une paire de clés publique et privée et vous connaissez les dates de validité de vos clés publiques. Pour plus d'informations, voir Générer une paire de clés publique et privée.
Procédure
Exportez votre clé publique vers le fichier
sb_cert.cer:# certutil -d /etc/pki/pesign \ -n 'Custom Secure Boot key' \ -Lr \ > sb_cert.cer
Importez votre clé publique dans la liste MOK :
# mokutil --import sb_cert.cer- Saisissez un nouveau mot de passe pour cette demande d'inscription au MOK.
Redémarrer la machine.
Le chargeur de démarrage
shimremarque la demande d'enrôlement de la clé MOK en attente et lanceMokManager.efipour vous permettre de terminer l'enrôlement à partir de la console UEFI.Choisissez
Enroll MOK, saisissez le mot de passe que vous avez précédemment associé à cette demande lorsque vous y êtes invité et confirmez l'inscription.Votre clé publique est ajoutée à la liste MOK, qui est persistante.
Une fois qu'une clé figure sur la liste MOK, elle est automatiquement propagée dans le trousseau
.platformlors de ce démarrage et des suivants lorsque l'UEFI Secure Boot est activé.
3.9. Signer un noyau avec la clé privée
Vous pouvez améliorer la sécurité de votre système en chargeant un noyau signé si le mécanisme de démarrage sécurisé de l'UEFI est activé.
Conditions préalables
- Vous avez généré une paire de clés publique et privée et vous connaissez les dates de validité de vos clés publiques. Pour plus d'informations, voir Générer une paire de clés publique et privée.
- Vous avez enregistré votre clé publique sur le système cible. Pour plus de détails, voir Enrôler une clé publique sur le système cible en ajoutant la clé publique à la liste MOK.
- Vous disposez d'une image de noyau au format ELF disponible pour la signature.
Procédure
Sur l'architecture x64 :
Créer une image signée :
# pesign --certificate 'Custom Secure Boot key' \ --in vmlinuz-version \ --sign \ --out vmlinuz-version.signed
Remplacez
versionpar le suffixe de version de votre fichiervmlinuz, etCustom Secure Boot keypar le nom que vous avez choisi précédemment.Facultatif : Vérifier les signatures :
# pesign --show-signature \ --in vmlinuz-version.signed
Remplacer l'image non signée par l'image signée :
# mv vmlinuz-version.signed vmlinuz-version
Sur l'architecture ARM 64 bits :
Décompressez le fichier
vmlinuz:# zcat vmlinuz-version > vmlinux-versionCréer une image signée :
# pesign --certificate 'Custom Secure Boot key' \ --in vmlinux-version \ --sign \ --out vmlinux-version.signed
Facultatif : Vérifier les signatures :
# pesign --show-signature \ --in vmlinux-version.signed
Compresser le fichier
vmlinux:# gzip --to-stdout vmlinux-version.signed > vmlinuz-versionSupprimer le fichier non compressé
vmlinux:# rm vmlinux-version*
3.10. Signer un build GRUB avec la clé privée
Sur un système où le mécanisme de démarrage sécurisé UEFI est activé, vous pouvez signer une version GRUB avec une clé privée personnalisée existante. Vous devez procéder ainsi si vous utilisez une version personnalisée de GRUB ou si vous avez supprimé l'ancre de confiance Microsoft de votre système.
Conditions préalables
- Vous avez généré une paire de clés publique et privée et vous connaissez les dates de validité de vos clés publiques. Pour plus d'informations, voir Générer une paire de clés publique et privée.
- Vous avez enregistré votre clé publique sur le système cible. Pour plus de détails, voir Enrôler une clé publique sur le système cible en ajoutant la clé publique à la liste MOK.
- Vous disposez d'un binaire GRUB EFI à signer.
Procédure
Sur l'architecture x64 :
Créer un binaire EFI GRUB signé :
# pesign --in /boot/efi/EFI/redhat/grubx64.efi \ --out /boot/efi/EFI/redhat/grubx64.efi.signed \ --certificate 'Custom Secure Boot key' \ --sign
Remplacez
Custom Secure Boot keypar le nom que vous avez choisi précédemment.Facultatif : Vérifier les signatures :
# pesign --in /boot/efi/EFI/redhat/grubx64.efi.signed \ --show-signature
Remplacer le binaire non signé par le binaire signé :
# mv /boot/efi/EFI/redhat/grubx64.efi.signed \ /boot/efi/EFI/redhat/grubx64.efi
Sur l'architecture ARM 64 bits :
Créer un binaire EFI GRUB signé :
# pesign --in /boot/efi/EFI/redhat/grubaa64.efi \ --out /boot/efi/EFI/redhat/grubaa64.efi.signed \ --certificate 'Custom Secure Boot key' \ --sign
Remplacez
Custom Secure Boot keypar le nom que vous avez choisi précédemment.Facultatif : Vérifier les signatures :
# pesign --in /boot/efi/EFI/redhat/grubaa64.efi.signed \ --show-signature
Remplacer le binaire non signé par le binaire signé :
# mv /boot/efi/EFI/redhat/grubaa64.efi.signed \ /boot/efi/EFI/redhat/grubaa64.efi
3.11. Signer les modules du noyau avec la clé privée
Vous pouvez renforcer la sécurité de votre système en chargeant des modules de noyau signés si le mécanisme de démarrage sécurisé de l'UEFI est activé.
Votre module noyau signé est également chargeable sur les systèmes où le Secure Boot UEFI est désactivé ou sur un système non UEFI. Par conséquent, vous n'avez pas besoin de fournir une version signée et une version non signée de votre module noyau.
Conditions préalables
- Vous avez généré une paire de clés publique et privée et vous connaissez les dates de validité de vos clés publiques. Pour plus d'informations, voir Générer une paire de clés publique et privée.
- Vous avez enregistré votre clé publique sur le système cible. Pour plus de détails, voir Enrôler une clé publique sur le système cible en ajoutant la clé publique à la liste MOK.
- Vous disposez d'un module de noyau au format d'image ELF disponible pour la signature.
Procédure
Exportez votre clé publique vers le fichier
sb_cert.cer:# certutil -d /etc/pki/pesign \ -n 'Custom Secure Boot key' \ -Lr \ > sb_cert.cer
Extraire la clé de la base de données du SSN sous la forme d'un fichier PKCS #12 :
# pk12util -o sb_cert.p12 \ -n 'Custom Secure Boot key' \ -d /etc/pki/pesign
- Lorsque la commande précédente vous y invite, entrez un nouveau mot de passe qui crypte la clé privée.
Exporter la clé privée non chiffrée :
# openssl pkcs12 \ -in sb_cert.p12 \ -out sb_cert.priv \ -nocerts \ -noenc
ImportantManipulez la clé privée non chiffrée avec précaution.
Signez votre module de noyau. La commande suivante ajoute la signature directement à l'image ELF dans le fichier du module du noyau :
# /usr/src/kernels/$(uname -r)/scripts/sign-file \ sha256 \ sb_cert.priv \ sb_cert.cer \ my_module.ko
Votre module noyau est maintenant prêt à être chargé.
Dans Red Hat Enterprise Linux 9, les dates de validité de la paire de clés sont importantes. La clé n'expire pas, mais le module du noyau doit être signé pendant la période de validité de sa clé de signature. L'utilitaire sign-file ne vous en avertira pas. Par exemple, une clé qui n'est valide qu'en 2021 peut être utilisée pour authentifier un module du noyau signé en 2021 avec cette clé. Cependant, les utilisateurs ne peuvent pas utiliser cette clé pour signer un module de noyau en 2022.
Vérification
Affiche des informations sur la signature du module du noyau :
# modinfo my_module.ko | grep signer signer: Your Name Key
Vérifiez que la signature mentionne votre nom tel qu'il a été saisi lors de la génération.
NoteLa signature annexée n'est pas contenue dans une section de l'image ELF et ne constitue pas une partie formelle de l'image ELF. Par conséquent, des utilitaires tels que
readelfne peuvent pas afficher la signature sur votre module de noyau.Charger le module :
# insmod my_module.koRetirer (décharger) le module :
# rmmod my_module.ko
Ressources supplémentaires
3.12. Chargement des modules signés du noyau
Une fois que votre clé publique est enregistrée dans le trousseau de clés du système (.builtin_trusted_keys) et dans la liste MOK, et après avoir signé le module du noyau concerné avec votre clé privée, vous pouvez charger le module du noyau signé à l'aide de la commande modprobe.
Conditions préalables
- Vous avez généré la paire de clés publique et privée. Pour plus d'informations, voir Générer une paire de clés publique et privée.
- Vous avez enregistré la clé publique dans le trousseau de clés du système. Pour plus de détails, voir Enrôler une clé publique sur le système cible en ajoutant la clé publique à la liste MOK.
- Vous avez signé un module du noyau avec la clé privée. Pour plus de détails, voir Signer des modules du noyau avec la clé privée.
Installez le paquet
kernel-modules-extra, qui crée le répertoire/lib/modules/$(uname -r)/extra/:# dnf -y install kernel-modules-extra
Procédure
Vérifiez que vos clés publiques se trouvent sur le trousseau de clés du système :
# keyctl list %:.platformCopiez le module du noyau dans le répertoire
extra/du noyau que vous voulez :# cp my_module.ko /lib/modules/$(uname -r)/extra/Mise à jour de la liste des dépendances modulaires :
# depmod -aCharger le module du noyau :
# modprobe -v my_moduleEn option, pour charger le module au démarrage, ajoutez-le au fichier
/etc/modules-loaded.d/my_module.confpour charger le module au démarrage :# echo "my_module" > /etc/modules-load.d/my_module.conf
Vérification
Vérifiez que le module a été chargé avec succès :
# lsmod | grep my_module
Ressources supplémentaires
Chapitre 4. Mise à jour de la liste de révocation de l'amorçage sécurisé
Vous pouvez mettre à jour la liste de révocation UEFI Secure Boot de votre système afin que Secure Boot identifie les logiciels présentant des problèmes de sécurité connus et les empêche de compromettre votre processus de démarrage.
4.1. Conditions préalables
- Secure Boot est activé sur votre système.
4.2. Comprendre le démarrage sécurisé de l'UEFI
La technologie Secure Boot de Unified Extensible Firmware Interface (UEFI) permet d'empêcher l'exécution du code de l'espace noyau qui n'a pas été signé par une clé de confiance. Le chargeur de démarrage du système est signé par une clé cryptographique. La base de données des clés publiques, qui est contenue dans le microprogramme, autorise la clé de signature. Vous pouvez ensuite vérifier une signature dans le chargeur de démarrage de l'étape suivante et dans le noyau.
L'UEFI Secure Boot établit une chaîne de confiance entre le microprogramme et les pilotes et modules du noyau signés, comme suit :
-
Une clé privée UEFI signe et une clé publique authentifie le chargeur de démarrage de première étape
shim. Un certificate authority (CA) signe à son tour la clé publique. L'autorité de certification est stockée dans la base de données du microprogramme. -
Le fichier
shimcontient la clé publique de Red Hat Red Hat Secure Boot (CA key 1) pour authentifier le chargeur de démarrage GRUB et le noyau. - Le noyau contient quant à lui des clés publiques pour authentifier les pilotes et les modules.
Secure Boot est le composant de validation du chemin de démarrage de la spécification UEFI. La spécification définit :
- Interface de programmation pour les variables UEFI protégées cryptographiquement dans une mémoire non volatile.
- Stockage des certificats racine X.509 de confiance dans les variables UEFI.
- Validation des applications UEFI telles que les chargeurs de démarrage et les pilotes.
- Procédures de révocation des certificats et des hachages d'applications connus comme mauvais.
L'UEFI Secure Boot permet de détecter les modifications non autorisées, mais ne permet pas d'accéder au site not:
- Empêcher l'installation ou la suppression des chargeurs de démarrage de deuxième niveau.
- Exiger une confirmation explicite de ces modifications par l'utilisateur.
- Arrêter les manipulations du chemin d'amorçage. Les signatures sont vérifiées lors du démarrage, et non lors de l'installation ou de la mise à jour du chargeur de démarrage.
Si le chargeur de démarrage ou le noyau ne sont pas signés par une clé de confiance du système, Secure Boot les empêche de démarrer.
4.3. La liste de révocation de Secure Boot
La Secure Boot Revocation List de l'UEFI, ou Secure Boot Forbidden Signature Database (dbx), est une liste qui identifie les logiciels dont l'exécution n'est plus autorisée par Secure Boot.
Lorsqu'un problème de sécurité ou de stabilité est détecté dans un logiciel interfacé avec Secure Boot, tel que le chargeur de démarrage GRUB, la liste de révocation enregistre sa signature de hachage. Les logiciels dont la signature est reconnue ne peuvent pas être exécutés pendant le démarrage, et le démarrage du système échoue afin d'éviter de compromettre le système.
Par exemple, une certaine version de GRUB peut contenir un problème de sécurité qui permet à un attaquant de contourner le mécanisme de démarrage sécurisé. Lorsque le problème est détecté, la liste de révocation ajoute les signatures de hachage de toutes les versions de GRUB qui contiennent le problème. Par conséquent, seules les versions sécurisées de GRUB peuvent démarrer sur le système.
La liste des révocations nécessite des mises à jour régulières afin de prendre en compte les problèmes nouvellement découverts. Lors de la mise à jour de la liste de révocation, veillez à utiliser une méthode de mise à jour sûre qui n'entraîne pas l'arrêt du démarrage de votre système actuellement installé.
4.4. Application d'une mise à jour en ligne de la liste de révocation
Vous pouvez mettre à jour la liste de révocation de l'amorçage sécurisé de votre système afin que l'amorçage sécurisé empêche les problèmes de sécurité connus. Cette procédure est sûre et garantit que la mise à jour n'empêche pas le démarrage de votre système.
Conditions préalables
- Votre système peut accéder à l'internet pour les mises à jour.
Procédure
Déterminer la version actuelle de la liste de révocation :
# fwupdmgr get-devices
Voir le champ
Current versionsousUEFI dbx.Activer le référentiel de listes de révocation LVFS :
# fwupdmgr enable-remote lvfs
Actualiser les métadonnées du référentiel :
# fwupdmgr refresh
Appliquer la mise à jour de la liste de révocation :
Sur la ligne de commande :
# fwupdmgr update
Dans l'interface graphique :
- Ouvrir l'application Software
- Naviguez jusqu'à l'onglet Updates.
- Trouvez l'entrée Secure Boot dbx Configuration Update.
- Cliquez sur .
-
À la fin de la mise à jour,
fwupdmgrou Software vous demande de redémarrer le système. Confirmez le redémarrage.
Vérification
Après le redémarrage, vérifiez à nouveau la version actuelle de la liste de révocation :
# fwupdmgr get-devices
4.5. Application d'une mise à jour de la liste de révocation hors ligne
Sur un système sans connexion internet, vous pouvez mettre à jour la Secure Boot Revocation List à partir de RHEL afin que Secure Boot prévienne les problèmes de sécurité connus. Cette procédure est sûre et garantit que la mise à jour n'empêche pas votre système de démarrer.
Procédure
Déterminer la version actuelle de la liste de révocation :
# fwupdmgr get-devices
Voir le champ
Current versionsousUEFI dbx.Liste des mises à jour disponibles auprès de RHEL :
# ls /usr/share/dbxtool/
Sélectionnez le fichier de mise à jour le plus récent pour votre architecture. Les noms de fichiers utilisent le format suivant :
DBXUpdate-date-architecture.cab
Installer le fichier de mise à jour sélectionné :
# fwupdmgr install /usr/share/dbxtool/DBXUpdate-date-architecture.cab
-
À la fin de la mise à jour,
fwupdmgrvous demande de redémarrer le système. Confirmez le redémarrage.
Vérification
Après le redémarrage, vérifiez à nouveau la version actuelle de la liste de révocation :
# fwupdmgr get-devices
Chapitre 5. Configuration des paramètres de la ligne de commande du noyau
Les paramètres de la ligne de commande du noyau vous permettent de modifier le comportement de certains aspects du noyau de Red Hat Enterprise Linux au moment du démarrage. En tant qu'administrateur système, vous avez un contrôle total sur les options qui sont définies au démarrage. Certains comportements du noyau ne peuvent être définis qu'au moment du démarrage, c'est pourquoi la compréhension de la manière d'effectuer ces changements est une compétence clé en matière d'administration.
Changer le comportement du système en modifiant les paramètres de la ligne de commande du noyau peut avoir des effets négatifs sur votre système. Testez toujours les modifications avant de les déployer dans la production. Pour plus d'informations, contactez l'assistance Red Hat.
5.1. Comprendre les paramètres de la ligne de commande du noyau
Les paramètres de la ligne de commande du noyau permettent d'écraser les valeurs par défaut et de définir des paramètres matériels spécifiques. Au moment du démarrage, vous pouvez configurer les fonctions suivantes :
- Le noyau Red Hat Enterprise Linux
- Le disque RAM initial
- Les caractéristiques de l'espace utilisateur
Par défaut, les paramètres de ligne de commande du noyau pour les systèmes utilisant le chargeur d'amorçage GRUB sont définis dans le fichier de configuration de l'entrée d'amorçage pour chaque entrée d'amorçage du noyau.
Vous pouvez manipuler les fichiers de configuration du chargeur de démarrage à l'aide de l'utilitaire grubby. L'utilitaire grubby vous permet d'effectuer les opérations suivantes :
- Modifier l'entrée de démarrage par défaut.
- Ajouter ou supprimer des arguments à une entrée du menu GRUB.
Ressources supplémentaires
-
kernel-command-line(7),bootparam(7)etdracut.cmdline(7)pages de manuel - Comment installer et démarrer des noyaux personnalisés dans Red Hat Enterprise Linux 8
-
La page du manuel
grubby(8)
5.2. Comprendre les entrées de démarrage
Une entrée de démarrage est un ensemble d'options stockées dans un fichier de configuration et liées à une version particulière du noyau. En pratique, vous avez au moins autant d'entrées de démarrage que de noyaux installés sur votre système. Le fichier de configuration de l'entrée de démarrage est situé dans le répertoire /boot/loader/entries/ et peut ressembler à ceci :
d8712ab6d4f14683c5625e87b52b6b6e-5.14.0-1.el9.x86_64.conf
Le nom du fichier ci-dessus se compose d'un identifiant de machine stocké dans le fichier /etc/machine-id et d'une version du noyau.
Le fichier de configuration de l'entrée de démarrage contient des informations sur la version du noyau, l'image initiale du disque dur et les paramètres de la ligne de commande du noyau. L'exemple du contenu d'un fichier de configuration d'entrée de démarrage est présenté ci-dessous :
title Red Hat Enterprise Linux (5.14.0-1.el9.x86_64) 9.0 (Plow) version 5.14.0-1.el9.x86_64 linux /vmlinuz-5.14.0-1.el9.x86_64 initrd /initramfs-5.14.0-1.el9.x86_64.img options root=/dev/mapper/rhel_kvm--02--guest08-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel_kvm--02--guest08-swap rd.lvm.lv=rhel_kvm-02-guest08/root rd.lvm.lv=rhel_kvm-02-guest08/swap console=ttyS0,115200 grub_users $grub_users grub_arg --unrestricted grub_class kernel
5.3. Modification des paramètres de la ligne de commande du noyau pour toutes les entrées de démarrage
Modifier les paramètres de la ligne de commande du noyau pour toutes les entrées de démarrage de votre système.
Lors de l'installation d'une nouvelle version du noyau dans les systèmes RHEL 9, l'outil grubby transmet les arguments de la ligne de commande du noyau de la version précédente.
Toutefois, cela ne s'applique pas à la version 9.0 de RHEL, dans laquelle les noyaux nouvellement installés perdent les options de ligne de commande précédentes. Vous devez exécuter la commande grub2-mkconfig sur le noyau nouvellement installé pour transmettre les paramètres à votre nouveau noyau. Pour plus d'informations sur ce problème connu, voir Chargeur de démarrage.
Conditions préalables
-
Vérifiez que l'utilitaire
grubbyest installé sur votre système. -
Vérifiez que l'utilitaire
ziplest installé sur votre système IBM Z.
Procédure
Pour ajouter un paramètre :
# grubby --update-kernel=ALL --args="<NEW_PARAMETER>"Pour les systèmes qui utilisent le chargeur d'amorçage GRUB et, sur IBM Z, qui utilisent le chargeur d'amorçage zIPL, la commande ajoute un nouveau paramètre de noyau à chaque fichier
/boot/loader/entries/<ENTRY>.conffichier.-
Sur IBM Z, exécutez la commande
ziplsans options pour mettre à jour le menu de démarrage.
-
Sur IBM Z, exécutez la commande
Pour supprimer un paramètre :
# grubby --update-kernel=ALL --remove-args="<PARAMETER_TO_REMOVE>"-
Sur IBM Z, exécutez la commande
ziplsans options pour mettre à jour le menu de démarrage.
-
Sur IBM Z, exécutez la commande
Après chaque mise à jour de votre paquetage de noyau, propagez les options de noyau configurées vers les nouveaux noyaux :
# grub2-mkconfig -o /etc/grub2.cfg
Ressources supplémentaires
- Comprendre les paramètres de la ligne de commande du noyau
-
grubby(8)etzipl(8)pages de manuel - grubby tool
5.4. Modification des paramètres de la ligne de commande du noyau pour une seule entrée de démarrage
Modifier les paramètres de la ligne de commande du noyau pour une seule entrée de démarrage sur votre système.
Conditions préalables
-
Vérifiez que les utilitaires
grubbyetziplsont installés sur votre système.
Procédure
Pour ajouter un paramètre :
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="<NEW_PARAMETER>"-
Sur IBM Z, exécutez la commande
ziplsans options pour mettre à jour le menu de démarrage.
-
Sur IBM Z, exécutez la commande
Pour supprimer un paramètre, procédez comme suit :
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --remove-args="<PARAMETER_TO_REMOVE>"-
Sur IBM Z, exécutez la commande
ziplsans options pour mettre à jour le menu de démarrage.
-
Sur IBM Z, exécutez la commande
-
grubbymodifie et stocke les paramètres de la ligne de commande du noyau d'une entrée de démarrage individuelle du noyau dans le fichier/boot/loader/entries/<ENTRY>.confdans le fichier
Ressources supplémentaires
- Comprendre les paramètres de la ligne de commande du noyau
-
grubby(8)etzipl(8)pages de manuel - grubby tool
5.5. Modification temporaire des paramètres de la ligne de commande du noyau au moment du démarrage
Apporter des modifications temporaires à une entrée de menu du noyau en modifiant les paramètres du noyau uniquement au cours d'un processus de démarrage unique.
Procédure
- Sélectionnez le noyau que vous souhaitez lancer lorsque le menu de démarrage de GRUB 2 s'affiche et appuyez sur la touche e pour modifier les paramètres du noyau.
-
Trouvez la ligne de commande du noyau en déplaçant le curseur vers le bas. La ligne de commande du noyau commence par
linuxsur les systèmes IBM Power Series 64 bits et x86-64 basés sur le BIOS, ou parlinuxefisur les systèmes UEFI. Déplacer le curseur à la fin de la ligne.
NoteAppuyer sur Ctrl+a pour sauter au début de la ligne et Ctrl+e pour passer à la fin de la ligne. Sur certains systèmes, les touches Home et End peuvent également fonctionner.
-
Modifiez les paramètres du noyau en fonction des besoins. Par exemple, pour faire fonctionner le système en mode d'urgence, ajoutez le paramètre emergency à la fin de la ligne
linux:
linux ($root)/vmlinuz-5.14.0-63.el9.x86_64 root=/dev/mapper/rhel-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet pass:quotes[_emergency_]
Pour activer les messages du système, supprimez les paramètres rhgb et quiet.
- Appuyer sur Ctrl+x pour démarrer avec le noyau sélectionné et les paramètres de ligne de commande modifiés.
Appuyez sur la touche Esc pour quitter l'édition de la ligne de commande et toutes les modifications effectuées par l'utilisateur seront supprimées.
Cette procédure ne s'applique qu'à un seul démarrage et n'apporte pas de modifications permanentes.
5.6. Configuration des paramètres GRUB pour permettre la connexion à une console série
La console série est utile lorsque vous devez vous connecter à un serveur sans tête ou à un système embarqué et que le réseau est en panne. Ou lorsque vous devez contourner les règles de sécurité et obtenir un accès de connexion sur un autre système.
Vous devez configurer certains paramètres par défaut de GRUB pour utiliser la connexion de console série.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Ajoutez les deux lignes suivantes au fichier
/etc/default/grub:GRUB_TERMINAL="serial" GRUB_SERIAL_COMMAND="serial --speed=9600 --unit=0 --word=8 --parity=no --stop=1"
La première ligne désactive le terminal graphique. La clé
GRUB_TERMINALremplace les valeurs des clésGRUB_TERMINAL_INPUTetGRUB_TERMINAL_OUTPUT.La deuxième ligne ajuste le débit en bauds (
--speed), la parité et d'autres valeurs en fonction de votre environnement et de votre matériel. Notez qu'une vitesse de transmission beaucoup plus élevée, par exemple 115200, est préférable pour des tâches telles que le suivi des fichiers journaux.Mettre à jour le fichier de configuration GRUB.
Sur les machines basées sur le BIOS :
# grub2-mkconfig -o /boot/grub2/grub.cfgSur les machines basées sur l'UEFI :
# grub2-mkconfig -o /boot/grub2/grub.cfg
- Redémarrez le système pour que les modifications soient prises en compte.
Chapitre 6. Configuration des paramètres du noyau au moment de l'exécution
En tant qu'administrateur système, vous pouvez modifier de nombreuses facettes du comportement du noyau de Red Hat Enterprise Linux lors de l'exécution. Configurez les paramètres du noyau au moment de l'exécution en utilisant la commande sysctl et en modifiant les fichiers de configuration dans les répertoires /etc/sysctl.d/ et /proc/sys/.
6.1. Qu'est-ce que les paramètres du noyau ?
Les paramètres du noyau sont des valeurs réglables que vous pouvez ajuster pendant que le système fonctionne. Il n'est pas nécessaire de redémarrer ou de recompiler le noyau pour que les modifications prennent effet.
Il est possible d'adresser les paramètres du noyau par l'intermédiaire de :
-
La commande
sysctl -
Le système de fichiers virtuel monté dans le répertoire
/proc/sys/ -
Les fichiers de configuration dans le répertoire
/etc/sysctl.d/
Les paramètres sont divisés en classes par le sous-système du noyau. Red Hat Enterprise Linux possède les classes de paramètres suivantes :
Tableau 6.1. Tableau des classes sysctl
| Classe accordable | Sous-système |
|---|---|
| abi | Domaines d'exécution et personnalités |
| crypto | Interfaces cryptographiques |
| débogage | Interfaces de débogage du noyau |
| dev | Informations spécifiques à l'appareil |
| fs | Paramètres globaux et spécifiques du système de fichiers |
| noyau | Paramètres globaux du noyau |
| net | Paramètres de réseau |
| sunrpc | Appel de procédure à distance Sun (NFS) |
| utilisateur | Limites de l'espace de nommage de l'utilisateur |
| vm | Optimisation et gestion de la mémoire, des tampons et du cache |
La configuration des paramètres du noyau sur un système de production nécessite une planification minutieuse. Des modifications non planifiées peuvent rendre le noyau instable et nécessiter un redémarrage du système. Vérifiez que vous utilisez des options valides avant de modifier les valeurs du noyau.
Ressources supplémentaires
-
sysctl(8)etsysctl.d(5)pages de manuel
6.2. Configurer temporairement les paramètres du noyau avec sysctl
La commande sysctl permet de définir temporairement les paramètres du noyau au moment de l'exécution. Cette commande est également utile pour lister et filtrer les paramètres.
Conditions préalables
- Autorisations de la racine
Procédure
Liste de tous les paramètres et de leurs valeurs.
# sysctl -aNoteLa commande
# sysctl -aaffiche les paramètres du noyau, qui peuvent être ajustés en cours d'exécution et au démarrage.Pour configurer temporairement un paramètre, entrez :
# sysctl <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>L'exemple de commande ci-dessus modifie la valeur du paramètre alors que le système est en cours d'exécution. Les modifications prennent effet immédiatement, sans qu'il soit nécessaire de redémarrer le système.
NoteLes modifications reviennent aux valeurs par défaut après le redémarrage du système.
Ressources supplémentaires
6.3. Configuration permanente des paramètres du noyau avec sysctl
Utilisez la commande sysctl pour définir de manière permanente les paramètres du noyau.
Conditions préalables
- Autorisations de la racine
Procédure
Liste de tous les paramètres.
# sysctl -aLa commande affiche tous les paramètres du noyau qui peuvent être configurés au moment de l'exécution.
Configurer un paramètre de manière permanente :
# sysctl -w <TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE> >> /etc/sysctl.confL'exemple de commande modifie la valeur ajustable et l'écrit dans le fichier
/etc/sysctl.conf, ce qui remplace les valeurs par défaut des paramètres du noyau. Les modifications prennent effet immédiatement et de manière persistante, sans qu'il soit nécessaire de redémarrer le système.
Pour modifier de manière permanente les paramètres du noyau, vous pouvez également modifier manuellement les fichiers de configuration dans le répertoire /etc/sysctl.d/.
Ressources supplémentaires
-
Les pages du manuel
sysctl(8)etsysctl.conf(5) - Utilisation des fichiers de configuration dans /etc/sysctl.d/ pour ajuster les paramètres du noyau
6.4. Utilisation des fichiers de configuration dans /etc/sysctl.d/ pour ajuster les paramètres du noyau
Modifiez manuellement les fichiers de configuration dans le répertoire /etc/sysctl.d/ pour définir de manière permanente les paramètres du noyau.
Conditions préalables
- Autorisations de la racine
Procédure
Créez un nouveau fichier de configuration à l'adresse
/etc/sysctl.d/.# vim /etc/sysctl.d/<some_file.conf>Inclure les paramètres du noyau, un par ligne.
<TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE><TUNABLE_CLASS>.<PARAMETER>=<TARGET_VALUE>- Sauvegarder le fichier de configuration.
Redémarrez la machine pour que les modifications soient prises en compte.
Sinon, pour appliquer les changements sans redémarrer, entrez :
# sysctl -p /etc/sysctl.d/<some_file.conf>Cette commande vous permet de lire les valeurs du fichier de configuration que vous avez créé précédemment.
Ressources supplémentaires
-
sysctl(8),sysctl.d(5)pages de manuel
6.5. Configuration temporaire des paramètres du noyau via /proc/sys/
Définir temporairement les paramètres du noyau par le biais des fichiers du répertoire du système de fichiers virtuels /proc/sys/.
Conditions préalables
- Autorisations de la racine
Procédure
Identifiez un paramètre du noyau que vous souhaitez configurer.
# ls -l /proc/sys/<TUNABLE_CLASS>/Les fichiers accessibles en écriture renvoyés par la commande peuvent être utilisés pour configurer le noyau. Les fichiers en lecture seule fournissent des informations sur les paramètres actuels.
Attribuer une valeur cible au paramètre du noyau.
# echo <TARGET_VALUE> > /proc/sys/<TUNABLE_CLASS>/<PARAMETER>La commande apporte des modifications à la configuration qui disparaîtront après le redémarrage du système.
En option, vérifiez la valeur du nouveau paramètre du noyau.
# cat /proc/sys/<TUNABLE_CLASS>/<PARAMETER>
Chapitre 7. Maintenir les paramètres de panique du noyau désactivés dans les environnements virtualisés
Lors de la configuration d'un environnement virtualisé dans RHEL 9, vous ne devez pas activer les paramètres du noyau softlockup_panic et nmi_watchdog, car l'environnement virtualisé peut déclencher un verrouillage logiciel intempestif qui ne devrait pas nécessiter une panique du système.
Les sections suivantes expliquent les raisons de ce conseil.
7.1. Qu'est-ce qu'un verrouillage souple ?
Un soft lockup est une situation généralement causée par un bogue, lorsqu'une tâche s'exécute dans l'espace du noyau sur une unité centrale sans être reprogrammée. La tâche ne permet pas non plus à une autre tâche de s'exécuter sur cette unité centrale particulière. En conséquence, un avertissement est affiché à l'utilisateur par le biais de la console système. Ce problème est également connu sous le nom de "soft lockup firing".
Ressources supplémentaires
7.2. Paramètres contrôlant la panique du noyau
Les paramètres suivants du noyau peuvent être définis pour contrôler le comportement d'un système lorsqu'un verrouillage progressif est détecté.
- softlockup_panic
Contrôle si le noyau panique ou non lorsqu'un blocage progressif est détecté.
Type Valeur Effect Integer
0
le noyau ne panique pas lors d'un verrouillage progressif
Integer
1
le noyau panique lors d'un verrouillage progressif
Par défaut, sur RHEL8, cette valeur est 0.
Pour pouvoir paniquer, le système doit d'abord détecter un blocage dur. La détection est contrôlée par le paramètre
nmi_watchdog.- nmi_watchdog
Contrôle si les mécanismes de détection de verrouillage (
watchdogs) sont actifs ou non. Ce paramètre est de type entier.Valeur Effect 0
désactive le détecteur de verrouillage
1
permet d'activer le détecteur de verrouillage
Le détecteur de blocage dur surveille la capacité de chaque unité centrale à répondre aux interruptions.
- watchdog_thresh
Contrôle la fréquence du chien de garde
hrtimer, des événements NMI et des seuils de verrouillage doux/dur.Seuil par défaut Seuil de verrouillage souple 10 secondes
2 *
watchdog_threshLa mise à zéro de ce paramètre désactive complètement la détection de verrouillage.
Ressources supplémentaires
7.3. Blocages intempestifs dans les environnements virtualisés
Le verrouillage progressif qui se déclenche sur les hôtes physiques, comme décrit dans Qu'est-ce qu'un verrouillage progressif, représente généralement un bogue du noyau ou du matériel. Le même phénomène se produisant sur des systèmes d'exploitation invités dans des environnements virtualisés peut représenter un faux avertissement.
Une charge de travail importante sur un hôte ou une forte contention sur une ressource spécifique telle que la mémoire, provoque généralement un déclenchement intempestif du verrouillage progressif. En effet, l'hôte peut planifier l'arrêt de l'unité centrale invitée pendant une période supérieure à 20 secondes. Ensuite, lorsque l'unité centrale invitée est à nouveau programmée pour fonctionner sur l'hôte, elle subit un time jump qui déclenche les temporisateurs nécessaires. Les temporisateurs comprennent également le chien de garde hrtimer, qui peut par conséquent signaler un verrouillage progressif de l'unité centrale invitée.
Étant donné qu'un verrouillage progressif dans un environnement virtualisé peut être erroné, vous ne devez pas activer les paramètres du noyau qui provoqueraient une panique du système lorsqu'un verrouillage progressif est signalé sur un processeur invité.
Pour comprendre les blocages logiciels dans les invités, il est essentiel de savoir que l'hôte planifie l'invité en tant que tâche, et que l'invité planifie ensuite ses propres tâches.
Chapitre 8. Ajustement des paramètres du noyau pour les serveurs de base de données
Il existe différents ensembles de paramètres du noyau qui peuvent affecter les performances d'applications de bases de données spécifiques. Pour garantir un fonctionnement efficace des serveurs de bases de données et des bases de données, il convient de configurer les paramètres du noyau en conséquence.
8.1. Introduction to database servers
A database server is a service that provides features of a database management system (DBMS). DBMS provides utilities for database administration and interacts with end users, applications, and databases.
Red Hat Enterprise Linux 9 provides the following database management systems:
- MariaDB 10.5
- MySQL 8.0
- PostgreSQL 13
- Redis 6
8.2. Paramètres affectant la performance des applications de base de données
Les paramètres suivants du noyau affectent les performances des applications de base de données.
- fs.aio-max-nr
Définit le nombre maximum d'opérations d'E/S asynchrones que le système peut gérer sur le serveur.
NoteL'augmentation du paramètre
fs.aio-max-nrn'entraîne aucune autre modification que l'augmentation de la limite aio.- fs.file-max
Définit le nombre maximum de file handles (noms de fichiers temporaires ou ID attribués aux fichiers ouverts) que le système peut prendre en charge à tout moment.
Le noyau alloue dynamiquement des gestionnaires de fichiers chaque fois qu'un gestionnaire de fichier est demandé par une application. Cependant, le noyau ne libère pas ces poignées de fichiers lorsqu'elles sont libérées par l'application. Il les recycle à la place. Cela signifie qu'au fil du temps, le nombre total de gestionnaires de fichiers alloués augmentera même si le nombre de gestionnaires de fichiers actuellement utilisés est faible.
- kernel.shmall
-
Définit le nombre total de pages de mémoire partagée pouvant être utilisées à l'échelle du système. Pour utiliser la totalité de la mémoire principale, la valeur du paramètre
kernel.shmalldoit être ≤ taille totale de la mémoire principale. - kernel.shmmax
- Définit la taille maximale en octets d'un seul segment de mémoire partagée qu'un processus Linux peut allouer dans son espace d'adressage virtuel.
- kernel.shmmni
- Définit le nombre maximum de segments de mémoire partagée que le serveur de base de données peut gérer.
- net.ipv4.ip_local_port_range
- Définit la plage de ports que le système peut utiliser pour les programmes qui souhaitent se connecter à un serveur de base de données sans numéro de port spécifique.
- net.core.rmem_default
- Définit la mémoire de la socket de réception par défaut via le protocole de contrôle de transmission (TCP).
- net.core.rmem_max
- Définit la mémoire maximale de la socket de réception via le protocole de contrôle de transmission (TCP).
- net.core.wmem_default
- Définit la mémoire de la socket d'envoi par défaut via le protocole de contrôle de transmission (TCP).
- net.core.wmem_max
- Définit la mémoire maximale de la socket d'envoi via le protocole de contrôle de transmission (TCP).
- vm.dirty_bytes / vm.dirty_ratio
-
Définit un seuil en octets / en pourcentage de mémoire salissable à partir duquel un processus générant des données salies est lancé dans la fonction
write().
Either vm.dirty_bytes or vm.dirty_ratio peuvent être spécifiés à la fois.
- vm.dirty_background_bytes / vm.dirty_background_ratio
- Définit un seuil en octets / en pourcentage de la mémoire salissable à partir duquel le noyau tente d'écrire activement les données salies sur le disque dur.
Either vm.dirty_background_bytes or vm.dirty_background_ratio peuvent être spécifiés à la fois.
- vm.dirty_writeback_centisecs
Définit un intervalle de temps entre les réveils périodiques des threads du noyau responsables de l'écriture des données sales sur le disque dur.
Les paramètres de ce noyau sont mesurés en centièmes de seconde.
- vm.dirty_expire_centisecs
Définit le délai après lequel les données sales sont suffisamment anciennes pour être écrites sur le disque dur.
Les paramètres de ce noyau sont mesurés en centièmes de seconde.
Ressources supplémentaires
Chapitre 9. Démarrer avec la journalisation du noyau
Les fichiers journaux sont des fichiers qui contiennent des messages sur le système, y compris le noyau, les services et les applications qui s'y exécutent. Le système de journalisation de Red Hat Enterprise Linux est basé sur le protocole intégré syslog. Divers utilitaires utilisent ce système pour enregistrer des événements et les organiser dans des fichiers journaux. Ces fichiers sont utiles lors de l'audit du système d'exploitation ou de la résolution de problèmes.
9.1. Qu'est-ce que l'anneau tampon du noyau ?
Pendant le processus de démarrage, la console fournit de nombreuses informations importantes sur la phase initiale du démarrage du système. Pour éviter la perte des premiers messages, le noyau utilise ce que l'on appelle un tampon circulaire. Ce tampon stocke tous les messages, y compris les messages de démarrage, générés par la fonction printk() dans le code du noyau. Les messages du tampon circulaire du noyau sont ensuite lus et stockés dans des fichiers journaux sur un support permanent, par exemple par le service syslog.
Le tampon mentionné ci-dessus est une structure de données cyclique qui a une taille fixe et qui est codée en dur dans le noyau. Les utilisateurs peuvent afficher les données stockées dans le tampon circulaire du noyau par le biais de la commande dmesg ou du fichier /var/log/boot.log. Lorsque le tampon circulaire est plein, les nouvelles données écrasent les anciennes.
Ressources supplémentaires
-
syslog(2)etdmesg(1)page du manuel
9.2. Rôle de printk sur les niveaux de journalisation et la journalisation du noyau
Chaque message rapporté par le noyau est associé à un niveau de journalisation qui définit l'importance du message. Le tampon circulaire du noyau, tel que décrit dans Qu'est-ce que le tampon circulaire du noyau, recueille les messages du noyau de tous les niveaux de journalisation. C'est le paramètre kernel.printk qui définit quels messages du tampon sont imprimés sur la console.
Les valeurs du niveau d'enregistrement se décomposent dans l'ordre suivant :
- 0 - Urgence du noyau. Le système est inutilisable.
- 1 - Alerte du noyau. Des mesures doivent être prises immédiatement.
- 2 - L'état du noyau est considéré comme critique.
- 3 - Condition d'erreur générale du noyau.
- 4 - Condition d'avertissement général du noyau.
- 5 - Notification par le noyau d'une condition normale mais significative.
- 6 - Message d'information du noyau.
- 7 - Messages de débogage du noyau.
Par défaut, kernel.printk dans RHEL 9 contient les quatre valeurs suivantes :
# sysctl kernel.printk
kernel.printk = 7 4 1 7Les quatre valeurs définissent ce qui suit :
- valeur. Console log-level, définit la priorité la plus basse des messages imprimés sur la console.
- valeur. Niveau de journalisation par défaut pour les messages sans niveau de journalisation explicite.
- valeur. Définit la configuration du niveau de journalisation le plus bas possible pour le niveau de journalisation de la console.
valeur. Définit la valeur par défaut du niveau de journalisation de la console au démarrage.
Chacune de ces valeurs définit une règle différente pour le traitement des messages d'erreur.
La valeur par défaut 7 4 1 7 printk permet un meilleur débogage de l'activité du noyau. Toutefois, lorsqu'il est associé à une console série, ce paramètre printk peut provoquer des rafales d'E/S intenses susceptibles d'empêcher temporairement un système RHEL de répondre. Pour éviter ce genre de situation, la valeur printk de 4 4 1 7 fonctionne généralement, mais au prix de la perte des informations de débogage supplémentaires.
Notez également que certains paramètres de la ligne de commande du noyau, tels que quiet ou debug, modifient les valeurs par défaut de kernel.printk.
Ressources supplémentaires
-
syslog(2)page du manuel
Chapitre 10. Le noyau de 64k pages
kernel-64k est un paquet de noyau supplémentaire et optionnel pour l'architecture ARM 64 bits qui prend en charge 64k pages. Ce noyau supplémentaire existe parallèlement au noyau RHEL 9 for ARM qui prend en charge 4k pages.
Les performances optimales du système sont directement liées aux différentes exigences en matière de configuration de la mémoire. Ces exigences sont prises en compte par les deux variantes du noyau, chacune convenant à des charges de travail différentes. RHEL 9 sur matériel ARM 64 bits propose ainsi deux tailles de page MMU :
- noyau de 4k pages pour une utilisation efficace de la mémoire dans les petits environnements,
-
kernel-64kpour les charges de travail avec de grands ensembles de travail à mémoire contiguë.
Le noyau 4k pages et kernel-64k ne diffèrent pas au niveau de l'expérience utilisateur puisque l'espace utilisateur est le même. Vous pouvez choisir la variante qui répond le mieux à votre situation.
- noyau de 4k pages
Utilisez des pages 4k pour une utilisation plus efficace de la mémoire dans des environnements plus petits, tels que ceux des instances Edge et des petites instances cloud à faible coût. Dans ces environnements, il n'est pas possible d'augmenter la quantité de mémoire physique du système en raison des contraintes d'espace, d'énergie et de coût. Par ailleurs, tous les processeurs ARM 64 bits ne prennent pas en charge une taille de page de 64 000.
Le noyau de 4 pages prend en charge l'installation graphique à l'aide d'Anaconda, les installations basées sur des images de système ou de nuage, ainsi que les installations avancées à l'aide de Kickstart.
kernel-64kLe noyau de 64k pages est une option utile pour les grands ensembles de données sur les plates-formes ARM.
kernel-64kconvient aux charges de travail à forte intensité de mémoire car il permet d'améliorer considérablement les performances globales du système, notamment en ce qui concerne les grandes bases de données, le calcul intensif et les performances des réseaux à haut débit.Vous devez choisir la taille de la page sur les systèmes à architecture ARM 64 bits au moment de l'installation. Vous pouvez installer
kernel-64kuniquement par Kickstart en ajoutant le paquetkernel-64kà la liste des paquets dans le fichierKickstart.
Ressources supplémentaires
Chapitre 11. Installation de kdump
Le service kdump est installé et activé par défaut sur les nouvelles installations de Red Hat Enterprise Linux. Découvrez kdump et comment installer kdump lorsqu'il n'est pas activé par défaut.
11.1. Qu'est-ce que kdump ?
kdump est un service qui fournit un mécanisme de vidage en cas de panne. Ce service vous permet de sauvegarder le contenu de la mémoire du système à des fins d'analyse. kdump utilise l'appel système kexec pour démarrer dans le second noyau (a capture kernel) sans redémarrer ; il capture ensuite le contenu de la mémoire du noyau accidenté (a crash dump ou a vmcore) et l'enregistre dans un fichier. Le second noyau réside dans une partie réservée de la mémoire du système.
Un crash dump du noyau peut être la seule information disponible en cas de défaillance du système (bogue critique). Par conséquent, le site opérationnel kdump est important dans les environnements critiques. Red Hat conseille aux administrateurs système de mettre à jour et de tester régulièrement kexec-tools dans le cadre du cycle normal de mise à jour du noyau. Ceci est particulièrement important lorsque de nouvelles fonctionnalités du noyau sont mises en œuvre.
Vous pouvez activer kdump pour tous les noyaux installés sur une machine ou seulement pour des noyaux spécifiques. Cette option est utile lorsque plusieurs noyaux sont utilisés sur une machine, dont certains sont suffisamment stables pour ne pas risquer de tomber en panne.
Lors de l'installation de kdump, un fichier par défaut /etc/kdump.conf est créé. Ce fichier contient la configuration minimale par défaut de kdump. Vous pouvez modifier ce fichier pour personnaliser la configuration de kdump, mais ce n'est pas obligatoire.
11.2. Installation de kdump avec Anaconda
Le programme d'installation Anaconda fournit un écran d'interface graphique pour la configuration de kdump au cours d'une installation interactive. L'écran de l'installateur est intitulé KDUMP et est disponible à partir de l'écran principal Installation Summary. Vous pouvez activer kdump et réserver la quantité de mémoire nécessaire.
Procédure
-
Allez dans le champ
Kdump. Activer
kdumpsi ce n'est pas déjà fait.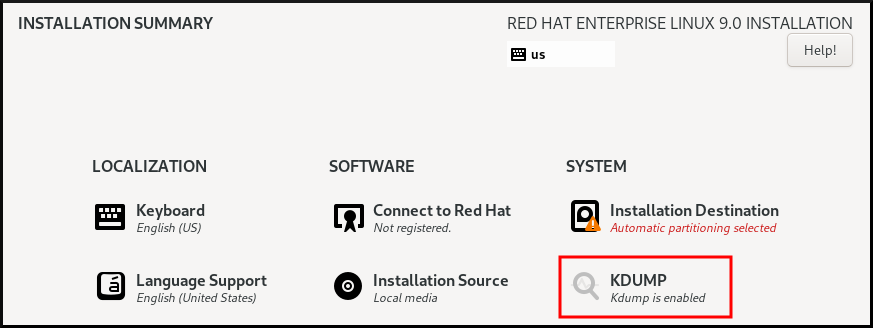
Définir la quantité de mémoire à réserver pour
kdump.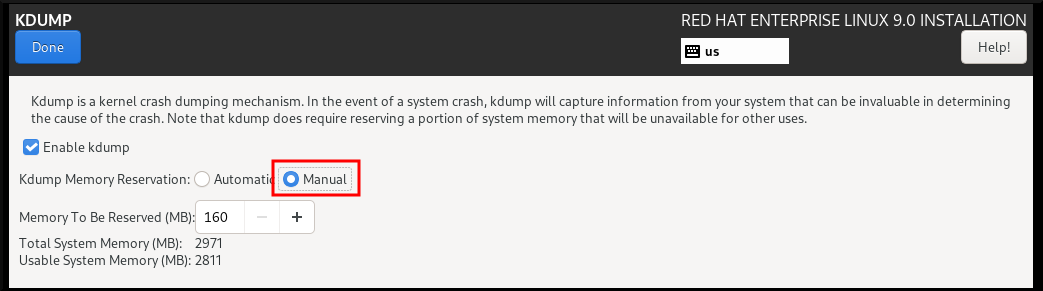
11.3. Installation de kdump en ligne de commande
Certaines options d'installation, telles que les installations personnalisées Kickstart, n'installent pas not ou n'activent pas kdump par défaut. Si c'est le cas, suivez la procédure ci-dessous.
Conditions préalables
- Un abonnement RHEL actif
- Le paquet kexec-tools
-
Satisfait aux exigences des configurations et des cibles
kdump. Pour plus de détails, voir Configurations et cibles kdump prises en charge.
Procédure
Vérifiez si
kdumpest installé sur votre système :# rpm -q kexec-toolsIndique si le paquet est installé :
# kexec-tools-2.0.22-13.el9.x86_64
Sortie si le paquet n'est pas installé :
le paquet kexec-tools n'est pas installé
Installez
kdumpet les autres paquets nécessaires en :# dnf install kexec-tools
Chapitre 12. Configuration de kdump sur la ligne de commande
La mémoire pour kdump est réservée lors du démarrage du système. La taille de la mémoire est configurée dans le fichier de configuration du Grand Unified Bootloader (GRUB) du système. La taille de la mémoire dépend de la valeur crashkernel= spécifiée dans le fichier de configuration et de la taille de la mémoire physique du système.
12.1. Configuration de l'utilisation de la mémoire de kdump
Le paquetage kexec-tools conserve les valeurs par défaut de réservation de la mémoire crashkernel. Le service kdump utilise la valeur par défaut pour réserver la mémoire crashkernel pour chaque noyau.
L'allocation automatique de mémoire pour kdump varie en fonction de l'architecture matérielle du système et de la taille de la mémoire disponible. Par exemple, sur l'architecture ARM 64 bits, les paramètres par défaut de crashkernel ne fonctionnent que lorsque la mémoire disponible est supérieure à 1 Go. kexec-tools par défaut, configure la réserve de mémoire suivante sur l'architecture ARM 64 bits :
crashkernel=1G-4G:256M,4G-64G:320M,64G:576M
Les besoins en mémoire du noyau de crash peuvent varier en fonction du matériel et des spécifications de la machine. Si la valeur par défaut de crashkernel ne fonctionne pas sur votre système, vous pouvez exécuter la commande kdumpctl estimate et demander une estimation approximative sans déclencher de crash. La valeur estimée de crashkernel peut ne pas être exacte et peut servir de référence pour définir une valeur appropriée de crashkernel.
L'option crashkernel=auto de la ligne de commande de démarrage n'est plus prise en charge sur RHEL 9 et les versions ultérieures.
Conditions préalables
- Vous disposez des privilèges de root sur le système.
-
Satisfait aux exigences de
kdumpen ce qui concerne les configurations et les cibles. Pour plus de détails, voir Configurations et cibles kdump prises en charge -
Sur les systèmes IBM Z, assurez-vous que l'utilitaire
ziplest installé.
Procédure
Configurer la valeur par défaut de
crashkernel:# kdumpctl reset-crashkernel --kernel=ALL(Facultatif) Pour utiliser une valeur personnalisée
crashkernel:Configurer la réserve de mémoire nécessaire :
crashkernel=1G-4G:192M,4G-:256M
L'exemple réserve 192 Mo de mémoire si la quantité totale de mémoire du système est égale ou supérieure à 1 Go et inférieure à 4 Go. Si la quantité totale de mémoire est supérieure à 4 Go, 256 Mo sont réservés pour
kdump.(Facultatif) Décaler la mémoire réservée :
Certains systèmes exigent de réserver de la mémoire avec un certain décalage fixe, car la réservation du noyau en cas de crash est très précoce, et il veut réserver une zone pour un usage spécial. Si le décalage est défini, la mémoire réservée commence à cet endroit. Pour décaler la mémoire réservée, utilisez la syntaxe suivante :
crashkernel=192M@16M
L'exemple ci-dessus réserve 192 Mo de mémoire en commençant par 16 Mo (adresse physique 0x01000000). Si le paramètre offset est fixé à 0 ou omis complètement,
kdumpdécale automatiquement la mémoire réservée. Vous pouvez également décaler la mémoire lors de la définition d'une réservation de mémoire variable en spécifiant le décalage comme dernière valeur. Par exemple,crashkernel=1G-4G:192M,2G-64G:256M@16M.
Mettre à jour la configuration du chargeur de démarrage :
# grubby --update-kernel ALL --args "crashkernel=<CUSTOM-VALUE>”Sur les systèmes IBM Z qui utilisent le chargeur de démarrage zIPL, la commande ajoute un nouveau paramètre de noyau à chaque fichier
/boot/loader/entries/<ENTRY>.conf.Sur les systèmes IBM Z, pour mettre à jour le menu de démarrage, exécutez la commande
ziplsans spécifier d'options :# zipl
Redémarrez pour que les modifications soient prises en compte :
# reboot
Vérification
Activez la touche
sysrqpour démarrer avec le noyaukdump:# echo 1 > /proc/sys/kernel/sysrq # echo c > /proc/sysrq-trigger
Cela oblige le noyau Linux à se planter et à copier le fichier
address-YYYY-MM-DD-HH:MM:SS/vmcoreà l'emplacement cible spécifié dans le fichier de configuration.Vérifiez que le fichier
vmcoreest déversé dans la cible comme spécifié dans le fichier/etc/kdump.conf:$ ls /var/crash/127.0.0.1-2022-01-18-0 /var/crash/127.0.0.1-2022-01-18-05:23:10': kexec-dmesg.log vmcore vmcore-dmesg.txtDans cet exemple, le noyau enregistre le fichier
vmcoredans le répertoire cible par défaut,/var/crash/.
12.2. Configuration de la cible kdump
Le crash dump est généralement stocké sous la forme d'un fichier dans un système de fichiers local, écrit directement sur un périphérique. Il est également possible de configurer l'envoi du crash dump sur un réseau à l'aide des protocoles NFS ou SSH. Une seule de ces options de conservation d'un fichier de crash dump peut être définie à la fois. Par défaut, le fichier est stocké dans le répertoire /var/crash/ du système de fichiers local.
Conditions préalables
-
Rootautorisations. -
Satisfait aux exigences des configurations et des cibles
kdump. Pour plus de détails, voir Configurations et cibles kdump prises en charge.
Procédure
Pour stocker le fichier crash dump dans le répertoire
/var/crash/du système de fichiers local, modifiez le fichier/etc/kdump.confet indiquez le chemin d'accès :chemin /var/crash
L'option
path /var/crashreprésente le chemin d'accès au système de fichiers dans lequelkdumpenregistre le fichier crash dump.Note-
Lorsque vous spécifiez une cible de vidage dans le fichier
/etc/kdump.conf, le chemin d'accès est relative vers la cible de vidage spécifiée. -
Si vous ne spécifiez pas de cible de vidage dans le fichier
/etc/kdump.conf, le chemin d'accès représente le chemin d'accès de absolute à partir du répertoire racine.
En fonction de ce qui est monté dans le système actuel, la cible de vidage et le chemin de vidage ajusté sont pris automatiquement.
Exemple 12.1. La configuration de la cible
kdump# grep -v ^# /etc/kdump.conf | grep -v ^$ ext4 /dev/mapper/vg00-varcrashvol path /var/crash core_collector makedumpfile -c --message-level 1 -d 31Ici, la cible de vidage est spécifiée (
ext4 /dev/mapper/vg00-varcrashvol), et donc montée à/var/crash. L'optionpathest également définie sur/var/crash, de sorte quekdumpenregistre le fichiervmcoredans le répertoire/var/crash/var/crash.-
Lorsque vous spécifiez une cible de vidage dans le fichier
Pour modifier le répertoire local dans lequel le crash dump doit être sauvegardé, en tant que
root, éditez le fichier de configuration/etc/kdump.conf:-
Supprimer le signe dièse ("#") au début de la ligne
#path /var/crash. Remplacez la valeur par le chemin d'accès au répertoire souhaité. Par exemple :
chemin /usr/local/cores
ImportantDans RHEL 9, le répertoire défini comme cible du kdump à l'aide de la directive
pathdoit exister lorsque le servicekdumpsystemdest démarré - sinon le service échoue.
-
Supprimer le signe dièse ("#") au début de la ligne
Pour écrire le fichier sur une autre partition, modifiez le fichier de configuration
/etc/kdump.conf:Supprimer le signe dièse ("#") au début de la ligne
#ext4, en fonction de votre choix.-
le nom de l'appareil (ligne
#ext4 /dev/vg/lv_kdump) -
étiquette du système de fichiers (ligne
#ext4 LABEL=/boot) -
UUID (ligne
#ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937)
-
le nom de l'appareil (ligne
Modifiez le type de système de fichiers ainsi que le nom, l'étiquette ou l'UUID du périphérique en fonction des valeurs souhaitées. Par exemple :
ext4 UUID=03138356-5e61-4ab3-b58e-27507ac41937
- NOTE
La syntaxe correcte pour spécifier les valeurs UUID est
UUID="correct-uuid"etUUID=correct-uuid.ImportantIl est recommandé de spécifier les périphériques de stockage à l'aide d'un
LABEL=ou d'unUUID=. La cohérence des noms de périphériques de disque tels que/dev/sda3n'est pas garantie au redémarrage.ImportantLors de la vidange vers un dispositif de stockage à accès direct (DASD) sur du matériel IBM Z, il est essentiel que les dispositifs de vidange soient correctement spécifiés dans
/etc/dasd.confavant de procéder.
Pour écrire le crash dump directement sur un périphérique, modifiez le fichier de configuration
/etc/kdump.conf:-
Supprimer le signe dièse ("#") au début de la ligne
#raw /dev/vg/lv_kdump. Remplacez la valeur par le nom de l'appareil prévu. Par exemple :
brut /dev/sdb1
-
Supprimer le signe dièse ("#") au début de la ligne
Pour enregistrer le crash dump sur une machine distante à l'aide du protocole
NFS:-
Supprimer le signe dièse ("#") au début de la ligne
#nfs my.server.com:/export/tmp. Remplacez la valeur par un nom d'hôte et un chemin d'accès au répertoire valides. Par exemple :
nfs penguin.example.com:/export/cores
-
Supprimer le signe dièse ("#") au début de la ligne
Pour enregistrer le crash dump sur une machine distante à l'aide du protocole
SSH:-
Supprimer le signe dièse ("#") au début de la ligne
#ssh user@my.server.comligne. - Remplacez la valeur par un nom d'utilisateur et un nom d'hôte valides.
Incluez votre clé
SSHdans la configuration.-
Supprimer le signe dièse au début de la ligne
#sshkey /root/.ssh/kdump_id_rsa. Remplacez la valeur par l'emplacement d'une clé valide sur le serveur vers lequel vous essayez de faire un dumping. Par exemple :
ssh john@penguin.example.com sshkey /root/.ssh/mykey
-
Supprimer le signe dièse au début de la ligne
-
Supprimer le signe dièse ("#") au début de la ligne
12.3. Configuration du collecteur principal
Le service kdump utilise le programme core_collector pour capturer l'image vmcore. Dans RHEL, l'utilitaire makedumpfile est le collecteur de noyau par défaut.
makedumpfile est un programme de vidage qui permet de copier uniquement les pages nécessaires en utilisant différents niveaux de vidage et de compresser la taille d'un fichier de vidage.
makedumpfile est un programme de vidage qui permet de ne copier que les pages nécessaires en utilisant différents niveaux de vidage et de compresser la taille d'un fichier de vidage.
En utilisant makedumpfile, vous pouvez créer un fichier de vidage de petite taille soit en compressant les données de vidage, soit en excluant des pages, soit les deux. Il a besoin des informations de débogage du premier noyau pour distinguer les pages inutiles en analysant la façon dont le premier noyau utilise la mémoire.
Syntaxe
core_collector makedumpfile -z -d 31 --message-level 1
Options
-
-c,-l,-z, ou-p: spécifie le format du fichier compressé pour chaque page lorsque vous utilisez l'une de ces options :-cpourzlib,-lpourlzo,-zpourzstd, ou-ppoursnappy. -
-d(dump_level)le paramètre : exclut des pages afin qu'elles ne soient pas copiées dans le fichier de vidage. --message-level: spécifie les types de messages.En utilisant
--message-level, vous pouvez limiter les sorties à imprimer. Par exemple, en spécifiant 7 comme niveau de message, les messages courants et les messages d'erreur sont imprimés. La valeur maximale pour--message_levelest 31.
Conditions préalables
-
Respecter les exigences de
kdumppour les configurations et les objectifs.
Procédure
En tant qu'utilisateur de
root, modifiez le fichier de configuration de/etc/kdump.confpour supprimer le signe de hachage ("#") au début de la commande suivante :core_collector makedumpfile -z -d 31 --message-level 1Pour activer la compression du fichier dump, spécifiez l'une des options
makedumpfile:core_collector makedumpfile -z -d 31 --message-level 1où,
-
-zspécifie le format de fichier compressédump. -
-dspécifie que le niveau de vidage est 31. -
--message-levelspécifie que le niveau du message est 1.
-
Prenons également l'exemple suivant, qui utilise -l:
Pour compresser un fichier dump à l'aide de
-l:core_collector makedumpfile -l -d 31 --message-level 1
Ressources supplémentaires
-
makedumpfile(8)page du manuel
12.4. Configuration des réponses d'échec par défaut de kdump
Par défaut, lorsque kdump ne parvient pas à créer un fichier de vidage de crash à l'emplacement cible configuré, le système redémarre et le vidage est perdu dans le processus. Pour modifier ce comportement, suivez la procédure ci-dessous.
Conditions préalables
- Vous disposez des droits d'accès au système.
-
Satisfait aux exigences des configurations et des objectifs de
kdump.
Procédure
-
Comme pour
root, supprimez le signe de hachage ("#") au début de la ligne#failure_actiondans le fichier de configuration/etc/kdump.conf. Remplacer la valeur par une action souhaitée.
failure_action poweroff
12.5. Fichier de configuration pour kdump
Le fichier de configuration du noyau kdump est /etc/sysconfig/kdump. Ce fichier contrôle les paramètres de la ligne de commande du noyau kdump.
Pour la plupart des configurations, utilisez les options par défaut. Toutefois, dans certains cas, vous devrez peut-être modifier certains paramètres pour contrôler le comportement du noyau kdump. Par exemple, modifier l'option KDUMP_COMMANDLINE_APPEND pour ajouter la ligne de commande du noyau kdump afin d'obtenir une sortie de débogage détaillée ou l'option KDUMP_COMMANDLINE_REMOVE pour supprimer les arguments de la ligne de commande kdump.
Pour plus d'informations sur les options de configuration supplémentaires, voir Documentation/admin-guide/kernel-parameters.txt ou le fichier /etc/sysconfig/kdump.
KDUMP_COMMANDLINE_REMOVECette option supprime les arguments de la ligne de commande
kdumpactuelle. Elle supprime les paramètres susceptibles de provoquer des erreurs surkdumpou des échecs de démarrage du noyau surkdump. Ces paramètres peuvent avoir été analysés par le processusKDUMP_COMMANDLINEprécédent ou hérités du fichier/proc/cmdline. Lorsque cette variable n'est pas configurée, elle hérite de toutes les valeurs du fichier/proc/cmdline. La configuration de cette option fournit également des informations utiles pour le débogage d'un problème.Example
Pour supprimer certains arguments, ajoutez-les à
KDUMP_COMMANDLINE_REMOVEcomme suit :# KDUMP_COMMANDLINE_REMOVE="hugepages hugepagesz slub_debug quiet log_buf_len swiotlb"KDUMP_COMMANDLINE_APPENDCette option ajoute des arguments à la ligne de commande actuelle. Ces arguments peuvent avoir été analysés par la variable
KDUMP_COMMANDLINE_REMOVEprécédente.Pour le noyau
kdump, la désactivation de certains modules tels quemce,cgroup,numa,hest_disablepeut aider à prévenir les erreurs du noyau. Ces modules peuvent consommer une part importante de la mémoire du noyau réservée àkdumpou provoquer des échecs de démarrage du noyaukdump.Example
Pour désactiver la mémoire
cgroupssur la ligne de commande du noyaukdump, exécutez la commande suivante :# KDUMP_COMMANDLINE_APPEND="cgroup_disable=memory"
Ressources supplémentaires
-
Documentation/admin-guide/kernel-parameters.txtfichier -
/etc/sysconfig/kdumpfichier
12.6. Activation et désactivation du service kdump
Pour lancer le service kdump au moment du démarrage, suivez la procédure ci-dessous.
Conditions préalables
-
Respecter les exigences de
kdumppour les configurations et les objectifs. -
Toutes les configurations pour l'installation de
kdumpsont établies en fonction de vos besoins.
Procédure
Pour activer le service
kdump, utilisez la commande suivante :# systemctl enable kdump.serviceCela permet au service de se rendre sur le site
multi-user.target.Pour démarrer le service dans la session en cours, utilisez la commande suivante :
# systemctl start kdump.servicePour arrêter le service
kdump, tapez la commande suivante :# systemctl stop kdump.servicePour désactiver le service
kdump, exécutez la commande suivante :# systemctl disable kdump.service
Il est recommandé de définir kptr_restrict=1 comme valeur par défaut. Lorsque kptr_restrict est défini sur (1) par défaut, le service kdumpctl charge le noyau de secours même si KASLR (Kernel Address Space Layout) est activé ou non.
Étape de dépannage
Lorsque kptr_restrict n'a pas la valeur (1) et que KASLR est activé, le contenu du fichier /proc/kore est généré sous la forme de zéros. Par conséquent, le service kdumpctl ne parvient pas à accéder à /proc/kcore et à charger le noyau de secours.
Pour contourner ce problème, le fichier kexec-kdump-howto.txt affiche un message d'avertissement, qui précise de conserver le paramètre recommandé, à savoir kptr_restrict=1.
Pour s'assurer que le service kdumpctl charge le noyau de crash, vérifiez que :
-
Kernel
kptr_restrict=1dans le fichiersysctl.conf.
12.7. Test de la configuration de kdump
Vous pouvez tester le fonctionnement et la validité du processus de crash dump avant que la machine n'entre en production.
Les commandes ci-dessous provoquent un crash du noyau. Soyez prudent lorsque vous suivez ces étapes, et ne les utilisez jamais sans précaution sur un système de production actif.
Procédure
-
Redémarrez le système avec
kdumpactivé. Assurez-vous que
kdumpest en cours d'exécution :# systemctl is-active kdump activeForcer le noyau Linux à se bloquer :
echo 1 > /proc/sys/kernel/sysrq echo c > /proc/sysrq-trigger
AvertissementLa commande ci-dessus plante le noyau, et un redémarrage est nécessaire.
Une fois redémarré, le fichier
address-YYYY-MM-DD-HH:MM:SS/vmcoreest créé à l'emplacement que vous avez spécifié dans le fichier/etc/kdump.conf(par défaut/var/crash/).NoteCette action confirme la validité de la configuration. Il est également possible d'utiliser cette action pour enregistrer le temps nécessaire à l'exécution d'un crash dump avec une charge de travail représentative.
Ressources supplémentaires
12.8. Empêcher le chargement des pilotes du noyau pour kdump
Vous pouvez empêcher le noyau de capture de charger certains pilotes du noyau en ajoutant la variable KDUMP_COMMANDLINE_APPEND= dans le fichier de configuration /etc/sysconfig/kdump. En utilisant cette méthode, vous pouvez empêcher l'image de disque RAM initiale kdump initramfs de charger le module de noyau spécifié. Cela permet d'éviter les erreurs de killer out-of-memory (oom) ou d'autres défaillances du noyau de capture.
Vous pouvez ajouter la variable KDUMP_COMMANDLINE_APPEND= en utilisant l'une des options de configuration suivantes :
-
rd.driver.blacklist=<modules> -
modprobe.blacklist=<modules>
Procédure
Sélectionnez un module du noyau dont vous souhaitez bloquer le chargement.
$ lsmod Module Size Used by fuse 126976 3 xt_CHECKSUM 16384 1 ipt_MASQUERADE 16384 1 uinput 20480 1 xt_conntrack 16384 1La commande
lsmodaffiche une liste des modules chargés dans le noyau en cours d'exécution.Mettre à jour la variable
KDUMP_COMMANDLINE_APPEND=dans le fichier/etc/sysconfig/kdump.# KDUMP_COMMANDLINE_APPEND="rd.driver.blacklist=hv_vmbus,hv_storvsc,hv_utils,hv_netvsc,hid-hyperv"Prenons également l'exemple suivant, qui utilise l'option de configuration
modprobe.blacklist=<modules>.# KDUMP_COMMANDLINE_APPEND="modprobe.blacklist=emcp modprobe.blacklist=bnx2fc modprobe.blacklist=libfcoe modprobe.blacklist=fcoe"Redémarrez le service
kdump.# systemctl restart kdump
Ressources supplémentaires
-
dracut.cmdlinepage de manuel
12.9. Exécution de kdump sur des systèmes dont le disque est crypté
Lorsque vous exécutez une partition chiffrée Linux Unified Key Setup (LUKS), le système a besoin d'une certaine quantité de mémoire disponible. Si le système dispose d'une quantité de mémoire disponible inférieure à celle requise, le service systemd-cryptsetup ne parvient pas à monter la partition. Par conséquent, la capture du fichier vmcore vers un emplacement cible crypté échoue dans le deuxième noyau (noyau de capture).
La commande kdumpctl estimate vous aide à estimer la quantité de mémoire dont vous avez besoin pour kdump. Elle imprime la valeur recommandée pour crashkernel, qui est la taille de mémoire la plus appropriée pour kdump.
La valeur recommandée de crashkernel est calculée en fonction de la taille actuelle du noyau, des modules du noyau, de initramfs et de la mémoire cible cryptée LUKS requise.
Si vous utilisez l'option personnalisée crashkernel, kdumpctl estimate imprime la valeur LUKS required size. Cette valeur correspond à la taille de la mémoire requise pour la cible cryptée LUKS.
Procédure
Imprimer la valeur estimée de
crashkernel:# kdumpctl estimate Encrypted kdump target requires extra memory, assuming using the keyslot with minimum memory requirement Reserved crashkernel: 256M Recommended crashkernel: 652M Kernel image size: 47M Kernel modules size: 8M Initramfs size: 20M Runtime reservation: 64M LUKS required size: 512M Large modules: none WARNING: Current crashkernel size is lower than recommended size 652M.Configurez la quantité de mémoire requise en augmentant
crashkerneljusqu'à la valeur souhaitée.# grubby –args=”crashkernel=652M” --update-kernel=ALLRedémarrez pour que les modifications soient prises en compte.
# reboot
Si le service kdump ne parvient toujours pas à enregistrer le fichier dump sur la cible cryptée, augmentez progressivement la valeur de crashkernel pour configurer une quantité de mémoire appropriée.
Chapitre 13. Configurations et cibles kdump prises en charge
13.1. Mémoire requise pour kdump
Pour que kdump puisse capturer un crash dump du noyau et le sauvegarder en vue d'une analyse ultérieure, une partie de la mémoire du système doit être réservée en permanence au noyau de capture. Lorsqu'elle est réservée, cette partie de la mémoire système n'est pas disponible pour le noyau principal.
Les besoins en mémoire varient en fonction de certains paramètres du système. L'un des principaux facteurs est l'architecture matérielle du système. Pour connaître l'architecture exacte de la machine (telle que Intel 64 et AMD64, également connue sous le nom de x86_64) et l'imprimer sur la sortie standard, utilisez la commande suivante :
$ uname -m
Le tableau suivant répertorie les exigences minimales en matière de mémoire afin de réserver automatiquement une taille de mémoire pour kdump sur les dernières versions disponibles. La taille varie en fonction de l'architecture du système et de la mémoire physique totale disponible.
Tableau 13.1. Quantité minimale de mémoire réservée requise pour kdump
| Architecture | Mémoire disponible | Mémoire minimale réservée |
|---|---|---|
|
AMD64 et Intel 64 ( | 1 GB à 4 GB | 160 Mo de RAM. |
| 4 Go à 64 Go | 192 Mo de RAM. | |
| 64 Go à 1 TB | 256 Mo de RAM. | |
| 1 TB et plus | 512 Mo de RAM. | |
|
architecture ARM 64 bits ( | 2 Go et plus | 448 Mo de RAM. |
|
IBM Power Systems ( | 2 GB à 4 GB | 384 Mo de RAM. |
| 4 Go à 16 Go | 512 Mo de RAM. | |
| 16 Go à 64 Go | 1 Go de RAM. | |
| 64 Go à 128 Go | 2 Go de RAM. | |
| 128 Go et plus | 4 Go de RAM. | |
|
IBM Z ( | 1 GB à 4 GB | 160 Mo de RAM. |
| 4 Go à 64 Go | 192 Mo de RAM. | |
| 64 Go à 1 TB | 256 Mo de RAM. | |
| 1 TB et plus | 512 Mo de RAM. |
Sur de nombreux systèmes, kdump est en mesure d'estimer la quantité de mémoire nécessaire et de la réserver automatiquement. Ce comportement est activé par défaut, mais ne fonctionne que sur les systèmes qui disposent de plus d'une certaine quantité de mémoire totale disponible, qui varie en fonction de l'architecture du système.
La configuration de la mémoire réservée basée sur la quantité totale de mémoire dans le système est une estimation au mieux. La mémoire réellement nécessaire peut varier en fonction d'autres facteurs tels que les périphériques d'E/S. L'utilisation d'une mémoire insuffisante peut empêcher un noyau de débogage de démarrer en tant que noyau de capture en cas de panique du noyau. Pour éviter ce problème, augmentez suffisamment la mémoire du noyau de débogage.
13.2. Seuil minimal de réservation de la mémoire
L'utilitaire kexec-tools configure par défaut le paramètre de ligne de commande crashkernel et réserve une certaine quantité de mémoire pour kdump. Pour que la réservation de mémoire par défaut fonctionne, le système doit disposer d'une certaine quantité de mémoire totale. La quantité de mémoire requise varie en fonction de l'architecture du système.
Le tableau suivant répertorie les valeurs seuils minimales pour l'allocation de la mémoire. Si le système dispose d'une mémoire inférieure à la valeur seuil spécifiée, vous devez configurer la mémoire manuellement.
Tableau 13.2. Quantité minimale de mémoire requise pour la réservation de mémoire
| Architecture | Mémoire requise |
|---|---|
|
AMD64 et Intel 64 ( | 1 GB |
|
IBM Power Systems ( | 2 GB |
|
IBM Z ( | 1 GB |
| ARM (aarch64) | 2 GB |
13.3. Cibles kdump prises en charge
Lorsqu'un crash du noyau est capturé, le fichier dump vmcore peut être écrit directement sur un périphérique, stocké en tant que fichier sur un système de fichiers local ou envoyé sur un réseau. Le tableau ci-dessous contient une liste complète des cibles de vidage qui sont actuellement prises en charge ou explicitement non prises en charge par kdump.
| Type | Objectifs soutenus | Cibles non soutenues |
|---|---|---|
| Dispositif brut | Tous les disques et partitions bruts attachés localement. | |
| Système de fichiers local |
|
Tout système de fichiers local non explicitement répertorié comme pris en charge dans ce tableau, y compris le type |
| Répertoire distant |
Les répertoires distants auxquels on accède en utilisant le protocole |
Répertoires distants du système de fichiers |
|
Accès à des répertoires distants à l'aide du protocole |
Répertoires distants accessibles à l'aide du protocole | Stockages basés sur des chemins multiples. |
|
Accès aux répertoires distants via | ||
|
Répertoires distants auxquels on accède en utilisant le protocole | ||
|
Répertoires distants auxquels on accède en utilisant le protocole | ||
| Répertoires distants accessibles à l'aide d'interfaces de réseau sans fil. | ||
L'utilisation du dump assisté par le micrologiciel (fadump) pour capturer un vmcore et le stocker sur une machine distante à l'aide du protocole SSH ou NFS entraîne le renommage de l'interface réseau en kdump-<interface-name>. Le renommage se produit si le <interface-name> est générique, par exemple *eth#, net#, et ainsi de suite. Ce problème survient parce que les scripts de capture vmcore dans le disque RAM initial (initrd) ajoutent le préfixe kdump- au nom de l'interface réseau pour garantir un nommage persistant. Comme le même initrd est également utilisé pour un démarrage normal, le nom de l'interface est également modifié pour le noyau de production.
13.4. Niveaux de filtrage kdump pris en charge
Pour réduire la taille du fichier dump, kdump utilise le collecteur de base makedumpfile pour compresser les données et, éventuellement, pour omettre les informations indésirables. Le tableau ci-dessous contient une liste complète des niveaux de filtrage actuellement pris en charge par l'utilitaire makedumpfile.
| Option | Description |
|---|---|
|
| Zéro page |
|
| Pages de cache |
|
| Cache privé |
|
| Pages d'utilisateurs |
|
| Pages gratuites |
La commande makedumpfile permet de supprimer les pages énormes transparentes et les pages hugetlbfs. Considérez ces deux types de pages hugepages comme des pages utilisateur et supprimez-les en utilisant le niveau -8.
13.5. Réponses d'échec par défaut prises en charge
Par défaut, lorsque kdump ne parvient pas à créer un core dump, le système d'exploitation redémarre. Vous pouvez cependant configurer kdump pour qu'il effectue une opération différente s'il ne parvient pas à enregistrer le core dump sur la cible principale. Le tableau ci-dessous répertorie toutes les actions par défaut actuellement prises en charge.
| Option | Description |
|---|---|
|
| Tenter de sauvegarder le core dump dans le système de fichiers racine. Cette option est particulièrement utile en combinaison avec une cible réseau : si la cible réseau est inaccessible, cette option configure kdump pour qu'il enregistre le core dump localement. Le système est ensuite redémarré. |
|
| Redémarrer le système, en perdant le core dump dans le processus. |
|
| Arrêter le système, en perdant le core dump dans le processus. |
|
| Eteindre le système, en perdant le core dump dans le processus. |
|
| Exécute une session shell à partir des initramfs, permettant à l'utilisateur d'enregistrer manuellement le core dump. |
|
|
Active des opérations supplémentaires telles que les actions |
|
|
Spécifie l'action à effectuer lorsqu'un dump risque d'échouer en cas de crash du noyau. L'option par défaut |
13.6. Utilisation du paramètre final_action
Le paramètre final_action vous permet d'utiliser certaines opérations supplémentaires telles que les actions reboot, halt et poweroff après la réussite de kdump ou à la fin d'un mécanisme failure_action invoqué à l'aide de shell ou dump_to_rootfs. Si l'option final_action n'est pas spécifiée, la valeur par défaut est reboot.
Procédure
Pour configurer
final_action, modifiez le fichier/etc/kdump.confet ajoutez l'une des options suivantes :# final_action <reboot | halt | poweroff>Redémarrez le service
kdumppour que les modifications soient prises en compte :# kdumpctl restart
13.7. Utilisation du paramètre failure_action
Le paramètre failure_action spécifie l'action à effectuer lorsqu'un dump échoue dans le cas d'un crash du noyau. L'action par défaut pour failure_action est reboot, qui redémarre le système.
failure_action spécifie l'une des actions suivantes à entreprendre :
-
rebootle système est redémarré après un échec de la vidange. -
dump_to_rootfsle fichier dump est enregistré sur le système de fichiers racine lorsqu'une cible de dump non racine est configurée. -
halt: arrête le système. -
poweroffarrête les opérations en cours sur le système. -
shell: démarre une session shell à l'intérieur deinitramfs, à partir de laquelle vous pouvez effectuer manuellement des actions de récupération supplémentaires.
Procédure :
Pour configurer une action à entreprendre en cas d'échec du vidage, modifiez le fichier
/etc/kdump.confet spécifiez l'une des optionsfailure_action:# failure_action <reboot | halt | poweroff | shell | dump_to_rootfs>Redémarrez le service
kdumppour que les modifications soient prises en compte :# kdumpctl restart
Chapitre 14. Mécanismes de vidage assistés par microprogramme
Firmware assisted dump (fadump) est un mécanisme de capture de dump, fourni comme alternative au mécanisme kdump sur les systèmes IBM POWER. Les mécanismes kexec et kdump sont utiles pour capturer les vidages du noyau sur les systèmes AMD64 et Intel 64. Cependant, certains matériels tels que les mini-systèmes et les ordinateurs centraux exploitent le micrologiciel embarqué pour isoler des régions de la mémoire et empêcher tout écrasement accidentel de données importantes pour l'analyse du crash. L'utilitaire fadump est optimisé pour les mécanismes fadump et leur intégration avec RHEL sur les systèmes IBM POWER.
14.1. Vidage assisté du micrologiciel sur le matériel PowerPC d'IBM
L'utilitaire fadump capture le fichier vmcore à partir d'un système entièrement réinitialisé avec des périphériques PCI et E/S. Ce mécanisme utilise le microprogramme pour préserver les régions de mémoire lors d'un crash. Ce mécanisme utilise le micrologiciel pour préserver les régions de mémoire lors d'une panne, puis réutilise les scripts de l'espace utilisateur kdump pour sauvegarder le fichier vmcore. Les régions de mémoire comprennent tout le contenu de la mémoire du système, à l'exception de la mémoire d'amorçage, des registres du système et des entrées de la table des pages matérielles (PTE).
Le mécanisme fadump offre une fiabilité accrue par rapport au type de vidage traditionnel, en redémarrant la partition et en utilisant un nouveau noyau pour vidanger les données du crash du noyau précédent. Le site fadump nécessite une plate-forme matérielle basée sur le processeur IBM POWER6 ou une version ultérieure.
Pour plus de détails sur le mécanisme fadump, y compris les méthodes de réinitialisation du matériel propres à PowerPC, voir le fichier /usr/share/doc/kexec-tools/fadump-howto.txt.
La zone de mémoire qui n'est pas préservée, connue sous le nom de mémoire d'amorçage, est la quantité de RAM nécessaire pour amorcer le noyau avec succès après une panne. Par défaut, la taille de la mémoire d'amorçage est de 256 Mo ou de 5 % de la mémoire vive totale du système, la valeur la plus élevée étant retenue.
Contrairement à l'événement kexec-initiated, le mécanisme fadump utilise le noyau de production pour récupérer un crash dump. Lors du redémarrage après une panne, le matériel PowerPC met le nœud de périphérique /proc/device-tree/rtas/ibm.kernel-dump à la disposition du système de fichiers proc (procfs). Les scripts fadump-aware kdump vérifient la présence du fichier vmcore, puis terminent le redémarrage du système proprement.
14.2. Activation du mécanisme de vidage assisté par le micrologiciel
Vous pouvez améliorer les capacités de crash dumping des systèmes IBM POWER en activant le mécanisme de firmware assisted dump (fadump).
Dans l'environnement Secure Boot, le chargeur de démarrage GRUB2 alloue une région de mémoire de démarrage, appelée Real Mode Area (RMA). La RMA a une taille de 512 Mo, qui est divisée entre les composants de démarrage et, si un composant dépasse la taille qui lui a été allouée, GRUB2 échoue avec une erreur de mémoire insuffisante (OOM).
N'activez pas le mécanisme de vidage assisté du micrologiciel (fadump) dans l'environnement Secure Boot sur RHEL 9.1 et les versions antérieures. Le chargeur de démarrage GRUB2 échoue avec l'erreur suivante :
error: ../../grub-core/kern/mm.c:376:out of memory. Press any key to continue…
Le système n'est récupérable que si vous augmentez la taille par défaut de initramfs en raison de la configuration de fadump.
Pour plus d'informations sur les méthodes de contournement permettant de restaurer le système, voir l'article Le démarrage du système s'arrête dans GRUB Out of Memory (OOM).
Conditions préalables
- Vous avez des privilèges d'administrateur (root privileges).
Procédure
-
Installez le paquetage
kexec-tools. Configurer la valeur par défaut de
crashkernel.# kdumpctl reset-crashkernel –fadump=on --kernel=ALL(Facultatif) Réserver la mémoire de démarrage au lieu de la valeur par défaut.
# grubby --update-kernel ALL --args=”fadump=on crashkernel=xxM"où
xxest la taille de la mémoire requise en mégaoctets.NoteLorsque vous spécifiez des options de configuration de démarrage, testez les configurations en redémarrant le noyau avec
kdumpactivé. Si le noyaukdumpne démarre pas, augmentez progressivement la valeur decrashkernelpour définir une valeur appropriée.Redémarrez pour que les modifications soient prises en compte.
# reboot
14.3. Mécanismes de vidage assistés par microprogramme sur le matériel IBM Z
Les systèmes IBM Z prennent en charge deux mécanismes de vidage assistés par microprogramme : Stand-alone dump (sadump) et VMDUMP dump file.
L'infrastructure kdump est prise en charge et utilisée sur les systèmes IBM Z. Toutefois, l'utilisation de l'une des méthodes de vidage assisté du micrologiciel (fadump) pour IBM Z peut offrir divers avantages :
-
Le mécanisme
sadumpest lancé et contrôlé à partir de la console du système et est stocké sur un périphérique amorçableIPL. -
Le mécanisme
VMDUMPest similaire à celui desadump. Cet outil est lancé à partir de la console du système, mais il récupère le dump résultant du matériel et le copie sur le système pour l'analyser. -
Ces méthodes, similaires à d'autres mécanismes de vidage basés sur le matériel, permettent de capturer l'état d'une machine au début de la phase de démarrage, avant que le service
kdumpne démarre. -
Bien que
VMDUMPcontienne un mécanisme permettant de recevoir le fichier dump dans un système Red Hat Enterprise Linux, la configuration et le contrôle deVMDUMPsont gérés à partir de la console IBM Z Hardware.
14.4. Utilisation de sadump sur les systèmes Fujitsu PRIMEQUEST
Le mécanisme Fujitsu sadump est conçu pour fournir une capture de vidage fallback dans le cas où kdump n'est pas en mesure de s'achever avec succès. Le mécanisme sadump est invoqué manuellement à partir de l'interface de la carte de gestion du système (MMB). En utilisant le MMB, configurez kdump comme pour un serveur Intel 64 ou AMD 64, puis effectuez les étapes supplémentaires suivantes pour activer sadump.
Procédure
Ajoutez ou modifiez les lignes suivantes dans le fichier
/etc/sysctl.confpour vous assurer quekdumpdémarre comme prévu poursadump:kernel.panic=0 kernel.unknown_nmi_panic=1
AvertissementEn particulier, assurez-vous qu'après
kdump, le système ne redémarre pas. Si le système redémarre après quekdumpn'a pas sauvegardé le fichiervmcore, il n'est pas possible d'invoquer le programmesadump.Définissez le paramètre
failure_actiondans/etc/kdump.confde manière appropriée commehaltoushell.failure_action shell
Ressources supplémentaires
- Manuel d'installation du serveur FUJITSU PRIMEQUEST 2000 Series
Chapitre 15. Analyse d'un core dump
Pour déterminer la cause de la panne du système, vous pouvez utiliser l'utilitaire crash qui fournit une invite interactive très similaire au débogueur GNU (GDB). Cet utilitaire vous permet d'analyser de manière interactive un core dump créé par kdump, netdump, diskdump ou xendump ainsi qu'un système Linux en cours d'exécution. Vous pouvez également utiliser Kernel Oops Analyzer ou l'outil Kdump Helper.
15.1. Installation de l'utilitaire de crash
Installer l'outil crash pour obtenir la suite d'analyse de base.
Procédure
Activer les référentiels concernés :
# subscription-manager repos --enable baseos repository# subscription-manager repos --enable appstream repository# subscription-manager repos --enable rhel-8-for-x86_64-baseos-debug-rpmsInstallez le paquetage
crash:# dnf install crashInstallez le paquetage
kernel-debuginfo:# dnf install kernel-debuginfoLe paquet correspond à votre noyau en cours d'exécution et fournit les données nécessaires à l'analyse du dump.
Ressources supplémentaires
15.2. Exécution et sortie de l'utilitaire de crash
Lancez l'utilitaire crash pour analyser la cause de la panne du système.
Conditions préalables
-
Identifier le noyau en cours d'exécution (par exemple
5.14.0-1.el9.x86_64).
Procédure
Pour lancer l'utilitaire
crash, deux paramètres nécessaires doivent être transmis à la commande :-
Les informations de débogage (une image vmlinuz décompressée), par exemple
/usr/lib/debug/lib/modules/5.14.0-1.el9.x86_64/vmlinux, sont fournies par le biais d'un paquetagekernel-debuginfospécifique. Le fichier vmcore actuel, par exemple
/var/crash/127.0.0.1-2021-09-13-14:05:33/vmcoreLa commande
crashqui en résulte se présente alors comme suit :# crash /usr/lib/debug/lib/modules/5.14.0-1.el9.x86_64/vmlinux /var/crash/127.0.0.1-2021-09-13-14:05:33/vmcoreUtilisez la même version de <kernel> qui a été capturée par
kdump.Exemple 15.1. Exécution de l'utilitaire de crash
L'exemple suivant montre l'analyse d'un core dump créé le 13 septembre 2021 à 14:05 PM, utilisant le noyau 5.14.0-1.el9.x86_64.
... WARNING: kernel relocated [202MB]: patching 90160 gdb minimal_symbol values KERNEL: /usr/lib/debug/lib/modules/5.14.0-1.el9.x86_64/vmlinux DUMPFILE: /var/crash/127.0.0.1-2021-09-13-14:05:33/vmcore [PARTIAL DUMP] CPUS: 2 DATE: Mon Sep 13 14:05:16 2021 UPTIME: 01:03:57 LOAD AVERAGE: 0.00, 0.00, 0.00 TASKS: 586 NODENAME: localhost.localdomain RELEASE: 5.14.0-1.el9.x86_64 VERSION: #1 SMP Wed Aug 29 11:51:55 UTC 2018 MACHINE: x86_64 (2904 Mhz) MEMORY: 2.9 GB PANIC: "sysrq: SysRq : Trigger a crash" PID: 10635 COMMAND: "bash" TASK: ffff8d6c84271800 [THREAD_INFO: ffff8d6c84271800] CPU: 1 STATE: TASK_RUNNING (SYSRQ) crash>
-
Les informations de débogage (une image vmlinuz décompressée), par exemple
Pour quitter l'invite interactive et mettre fin à
crash, tapezexitouq.Exemple 15.2. Quitter l'utilitaire de crash
crash> exit ~]#
La commande crash peut également être utilisée comme un outil puissant pour le débogage d'un système réel. Toutefois, il convient de l'utiliser avec précaution afin de ne pas casser votre système.
Ressources supplémentaires
15.3. Affichage de divers indicateurs dans l'utilitaire de crash
L'utilitaire crash permet d'afficher divers indicateurs, tels qu'un tampon de messages du noyau, une trace rétrospective, l'état d'un processus, des informations sur la mémoire virtuelle et les fichiers ouverts.
- Affichage de la mémoire tampon des messages
-
Pour afficher le tampon de messages du noyau, tapez la commande
logà l'invite interactive, comme indiqué dans l'exemple ci-dessous :
crash> log ... several lines omitted ... EIP: 0060:[<c068124f>] EFLAGS: 00010096 CPU: 2 EIP is at sysrq_handle_crash+0xf/0x20 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 ESI: c0a09ca0 EDI: 00000286 EBP: 00000000 ESP: ef4dbf24 DS: 007b ES: 007b FS: 00d8 GS: 00e0 SS: 0068 Process bash (pid: 5591, ti=ef4da000 task=f196d560 task.ti=ef4da000) Stack: c068146b c0960891 c0968653 00000003 00000000 00000002 efade5c0 c06814d0 <0> fffffffb c068150f b7776000 f2600c40 c0569ec4 ef4dbf9c 00000002 b7776000 <0> efade5c0 00000002 b7776000 c0569e60 c051de50 ef4dbf9c f196d560 ef4dbfb4 Call Trace: [<c068146b>] ? __handle_sysrq+0xfb/0x160 [<c06814d0>] ? write_sysrq_trigger+0x0/0x50 [<c068150f>] ? write_sysrq_trigger+0x3f/0x50 [<c0569ec4>] ? proc_reg_write+0x64/0xa0 [<c0569e60>] ? proc_reg_write+0x0/0xa0 [<c051de50>] ? vfs_write+0xa0/0x190 [<c051e8d1>] ? sys_write+0x41/0x70 [<c0409adc>] ? syscall_call+0x7/0xb Code: a0 c0 01 0f b6 41 03 19 d2 f7 d2 83 e2 03 83 e0 cf c1 e2 04 09 d0 88 41 03 f3 c3 90 c7 05 c8 1b 9e c0 01 00 00 00 0f ae f8 89 f6 <c6> 05 00 00 00 00 01 c3 89 f6 8d bc 27 00 00 00 00 8d 50 d0 83 EIP: [<c068124f>] sysrq_handle_crash+0xf/0x20 SS:ESP 0068:ef4dbf24 CR2: 0000000000000000
Tapez
help logpour plus d'informations sur l'utilisation de la commande.NoteLe tampon de messages du noyau contient les informations les plus essentielles sur la panne du système et, en tant que tel, il est toujours déversé en premier dans le fichier
vmcore-dmesg.txt. Ceci est utile lorsqu'une tentative d'obtenir le fichiervmcorecomplet a échoué, par exemple en raison d'un manque d'espace sur l'emplacement cible. Par défaut,vmcore-dmesg.txtest situé dans le répertoire/var/crash/.-
Pour afficher le tampon de messages du noyau, tapez la commande
- Affichage d'une trace rétrospective
-
Pour afficher la trace de la pile du noyau, utilisez la commande
bt.
crash> bt PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" #0 [ef4dbdcc] crash_kexec at c0494922 #1 [ef4dbe20] oops_end at c080e402 #2 [ef4dbe34] no_context at c043089d #3 [ef4dbe58] bad_area at c0430b26 #4 [ef4dbe6c] do_page_fault at c080fb9b #5 [ef4dbee4] error_code (via page_fault) at c080d809 EAX: 00000063 EBX: 00000063 ECX: c09e1c8c EDX: 00000000 EBP: 00000000 DS: 007b ESI: c0a09ca0 ES: 007b EDI: 00000286 GS: 00e0 CS: 0060 EIP: c068124f ERR: ffffffff EFLAGS: 00010096 #6 [ef4dbf18] sysrq_handle_crash at c068124f #7 [ef4dbf24] __handle_sysrq at c0681469 #8 [ef4dbf48] write_sysrq_trigger at c068150a #9 [ef4dbf54] proc_reg_write at c0569ec2 #10 [ef4dbf74] vfs_write at c051de4e #11 [ef4dbf94] sys_write at c051e8cc #12 [ef4dbfb0] system_call at c0409ad5 EAX: ffffffda EBX: 00000001 ECX: b7776000 EDX: 00000002 DS: 007b ESI: 00000002 ES: 007b EDI: b7776000 SS: 007b ESP: bfcb2088 EBP: bfcb20b4 GS: 0033 CS: 0073 EIP: 00edc416 ERR: 00000004 EFLAGS: 00000246Type
bt <pid>pour afficher la trace d'un processus spécifique ou tapezhelp btpour plus d'informations sur l'utilisation debt.-
Pour afficher la trace de la pile du noyau, utilisez la commande
- Affichage de l'état d'un processus
-
Pour afficher l'état des processus dans le système, utilisez la commande
ps.
crash>
psPID PPID CPU TASK ST %MEM VSZ RSS COMM > 0 0 0 c09dc560 RU 0.0 0 0 [swapper] > 0 0 1 f7072030 RU 0.0 0 0 [swapper] 0 0 2 f70a3a90 RU 0.0 0 0 [swapper] > 0 0 3 f70ac560 RU 0.0 0 0 [swapper] 1 0 1 f705ba90 IN 0.0 2828 1424 init ... several lines omitted ... 5566 1 1 f2592560 IN 0.0 12876 784 auditd 5567 1 2 ef427560 IN 0.0 12876 784 auditd 5587 5132 0 f196d030 IN 0.0 11064 3184 sshd > 5591 5587 2 f196d560 RU 0.0 5084 1648 bashUtiliser
ps <pid>pour afficher l'état d'un seul processus spécifique. Utilisez help ps pour plus d'informations sur l'utilisation deps.-
Pour afficher l'état des processus dans le système, utilisez la commande
- Affichage des informations sur la mémoire virtuelle
-
Pour afficher des informations de base sur la mémoire virtuelle, tapez la commande
vmà l'invite interactive.
crash> vm PID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" MM PGD RSS TOTAL_VM f19b5900 ef9c6000 1648k 5084k VMA START END FLAGS FILE f1bb0310 242000 260000 8000875 /lib/ld-2.12.so f26af0b8 260000 261000 8100871 /lib/ld-2.12.so efbc275c 261000 262000 8100873 /lib/ld-2.12.so efbc2a18 268000 3ed000 8000075 /lib/libc-2.12.so efbc23d8 3ed000 3ee000 8000070 /lib/libc-2.12.so efbc2888 3ee000 3f0000 8100071 /lib/libc-2.12.so efbc2cd4 3f0000 3f1000 8100073 /lib/libc-2.12.so efbc243c 3f1000 3f4000 100073 efbc28ec 3f6000 3f9000 8000075 /lib/libdl-2.12.so efbc2568 3f9000 3fa000 8100071 /lib/libdl-2.12.so efbc2f2c 3fa000 3fb000 8100073 /lib/libdl-2.12.so f26af888 7e6000 7fc000 8000075 /lib/libtinfo.so.5.7 f26aff2c 7fc000 7ff000 8100073 /lib/libtinfo.so.5.7 efbc211c d83000 d8f000 8000075 /lib/libnss_files-2.12.so efbc2504 d8f000 d90000 8100071 /lib/libnss_files-2.12.so efbc2950 d90000 d91000 8100073 /lib/libnss_files-2.12.so f26afe00 edc000 edd000 4040075 f1bb0a18 8047000 8118000 8001875 /bin/bash f1bb01e4 8118000 811d000 8101873 /bin/bash f1bb0c70 811d000 8122000 100073 f26afae0 9fd9000 9ffa000 100073 ... several lines omitted ...
Utilisez
vm <pid>pour afficher des informations sur un seul processus spécifique, ou utilisezhelp vmpour plus d'informations sur l'utilisation devm.-
Pour afficher des informations de base sur la mémoire virtuelle, tapez la commande
- Affichage des fichiers ouverts
-
Pour afficher des informations sur les fichiers ouverts, utilisez la commande
files.
crash>
filesPID: 5591 TASK: f196d560 CPU: 2 COMMAND: "bash" ROOT: / CWD: /root FD FILE DENTRY INODE TYPE PATH 0 f734f640 eedc2c6c eecd6048 CHR /pts/0 1 efade5c0 eee14090 f00431d4 REG /proc/sysrq-trigger 2 f734f640 eedc2c6c eecd6048 CHR /pts/0 10 f734f640 eedc2c6c eecd6048 CHR /pts/0 255 f734f640 eedc2c6c eecd6048 CHR /pts/0Utiliser
files <pid>pour afficher les fichiers ouverts par un seul processus sélectionné, ou utilisezhelp filespour plus d'informations sur l'utilisation defiles.-
Pour afficher des informations sur les fichiers ouverts, utilisez la commande
15.4. Utilisation de l'analyseur d'erreurs du noyau
L'outil Kernel Oops Analyzer analyse le crash dump en comparant les messages oops avec les problèmes connus dans la base de connaissances.
Conditions préalables
- Sécuriser un message oops pour alimenter l'analyseur d'oops du noyau.
Procédure
- Accédez à l'outil Kernel Oops Analyzer.
Pour diagnostiquer un problème de crash du noyau, téléchargez un journal des opérations du noyau généré à l'adresse
vmcore.Vous pouvez également diagnostiquer un problème de crash du noyau en fournissant un message texte ou une adresse
vmcore-dmesg.txtcomme entrée.
-
Cliquez sur
DETECTpour comparer le message oops basé sur les informations demakedumpfileavec les solutions connues.
Ressources supplémentaires
15.5. L'outil Kdump Helper
L'outil Kdump Helper permet de configurer le site kdump à l'aide des informations fournies. Kdump Helper génère un script de configuration basé sur vos préférences. L'exécution du script sur votre serveur permet de configurer le service kdump.
Ressources supplémentaires
Chapitre 16. Application de correctifs avec le live patching du noyau
Vous pouvez utiliser la solution de correction en direct du noyau de Red Hat Enterprise Linux pour corriger un noyau en cours d'exécution sans redémarrer ou relancer de processus.
Avec cette solution, les administrateurs de systèmes :
- Peut appliquer immédiatement des correctifs de sécurité critiques au noyau.
- Il n'est pas nécessaire d'attendre l'achèvement de tâches de longue haleine, la déconnexion des utilisateurs ou des temps d'arrêt programmés.
- Contrôlez davantage le temps de fonctionnement du système sans sacrifier la sécurité ou la stabilité.
Notez que tous les CVE critiques ou importants ne seront pas résolus à l'aide de la solution de correctifs en direct du noyau. Notre objectif est de réduire les redémarrages nécessaires pour les correctifs liés à la sécurité, et non de les éliminer complètement. Pour plus de détails sur le champ d'application des correctifs en direct, voir le fichier Customer Portal Solutions article.
Certaines incompatibilités existent entre le live patching du noyau et d'autres sous-composants du noyau. Lire le
Limites de kpatch avant d'utiliser le live patching du noyau.
16.1. Limites de kpatch
-
La fonction
kpatchn'est pas un mécanisme général de mise à jour du noyau. Elle est utilisée pour appliquer des mises à jour simples de sécurité et de correction de bogues lorsque le redémarrage du système n'est pas possible dans l'immédiat. -
N'utilisez pas les outils
SystemTapoukprobependant ou après le chargement d'un correctif. Le correctif pourrait ne pas prendre effet tant que ces sondes n'ont pas été supprimées.
16.2. Prise en charge des correctifs en direct de tiers
L'utilitaire kpatch est le seul utilitaire de correction en direct du noyau pris en charge par Red Hat avec les modules RPM fournis par les dépôts Red Hat. Red Hat ne supportera aucun correctif en direct qui n'a pas été fourni par Red Hat lui-même.
Si vous avez besoin d'assistance pour un problème qui survient avec un correctif tiers, Red Hat vous recommande d'ouvrir un dossier avec le fournisseur du correctif au début de toute investigation dans laquelle une détermination de la cause première est nécessaire. Cela permet de fournir le code source si le vendeur le permet, et à son organisation de support de fournir une assistance dans la détermination de la cause première avant d'escalader l'enquête vers le support de Red Hat.
Pour tout système fonctionnant avec des correctifs tiers, Red Hat se réserve le droit de demander une reproduction avec les logiciels fournis et pris en charge par Red Hat. Dans le cas où cela n'est pas possible, nous demandons qu'un système et une charge de travail similaires soient déployés sur votre environnement de test sans application de correctifs réels, afin de confirmer si le même comportement est observé.
Pour plus d'informations sur les politiques de prise en charge des logiciels tiers, voir Comment Red Hat Global Support Services gère-t-il les logiciels tiers, les pilotes et/ou le matériel/hyperviseurs non certifiés ou les systèmes d'exploitation invités ?
16.3. Accès aux correctifs du noyau
La capacité de correction en direct du noyau est mise en œuvre sous la forme d'un module du noyau (kmod) livré sous la forme d'un paquetage RPM.
Tous les clients ont accès aux correctifs du noyau, qui sont livrés par les canaux habituels. Toutefois, les clients qui ne souscrivent pas à une offre de support étendu perdront l'accès aux nouveaux correctifs pour la version mineure actuelle dès que la version mineure suivante sera disponible. Par exemple, les clients ayant souscrit un abonnement standard ne pourront bénéficier de correctifs en direct pour le noyau RHEL 9.1 que jusqu'à la sortie du noyau RHEL 9.2.
16.4. Composants du correctif en direct du noyau
Les composants du live patching du noyau sont les suivants :
- Module de correction du noyau
- Mécanisme de distribution des correctifs du noyau.
- Un module de noyau qui est construit spécifiquement pour le noyau à corriger.
- Le module patch contient le code des correctifs souhaités pour le noyau.
-
Les modules de correction s'enregistrent auprès du sous-système du noyau
livepatchet fournissent des informations sur les fonctions originales à remplacer, ainsi que des pointeurs correspondants vers les fonctions de remplacement. Les modules de correction du noyau sont livrés sous forme de RPM. -
La convention d'appellation est la suivante :
kpatch_<kernel version>_<kpatch version>_<kpatch release>. La partie "version du noyau" du nom a été remplacée par underscores à la place de dots.
- L'utilitaire
kpatch - Un utilitaire de ligne de commande pour la gestion des modules de correctifs.
- Le service
kpatch -
Un service
systemdrequis parmultiuser.target. Cette cible charge le module de correction du noyau au démarrage. - Le paquet
kpatch-dnf - Un plugin DNF livré sous la forme d'un paquetage RPM. Ce plugin gère l'abonnement automatique aux correctifs du noyau.
16.5. Comment fonctionne le live patching du noyau
La solution de correction du noyau kpatch utilise le sous-système du noyau livepatch pour rediriger les anciennes fonctions vers les nouvelles. Lorsqu'un correctif du noyau est appliqué à un système, les choses suivantes se produisent :
-
Le module de correction du noyau est copié dans le répertoire
/var/lib/kpatch/et enregistré pour être réappliqué au noyau parsystemdlors du prochain démarrage. -
Le module kpatch est chargé dans le noyau en cours d'exécution et les nouvelles fonctions sont enregistrées dans le mécanisme
ftraceavec un pointeur sur l'emplacement en mémoire du nouveau code. -
Lorsque le noyau accède à la fonction corrigée, il est redirigé par le mécanisme
ftracequi contourne les fonctions d'origine et redirige le noyau vers la version corrigée de la fonction.
Figure 16.1. Comment fonctionne le live patching du noyau

16.6. Abonnement des noyaux actuellement installés au flux de correctifs en direct
Un module de correction du noyau est livré dans un paquet RPM, spécifique à la version du noyau faisant l'objet de la correction. Chaque paquet RPM sera mis à jour de manière cumulative au fil du temps.
La procédure suivante explique comment s'abonner à toutes les futures mises à jour cumulatives des correctifs en direct pour un noyau donné. Les correctifs en direct étant cumulatifs, vous ne pouvez pas sélectionner les correctifs individuels déployés pour un noyau donné.
Red Hat ne prend pas en charge les correctifs de tiers appliqués à un système pris en charge par Red Hat.
Conditions préalables
- Autorisations de la racine
Procédure
Si vous le souhaitez, vérifiez la version de votre noyau :
# uname -r 5.14.0-1.el9.x86_64Recherchez un paquet de correctifs correspondant à la version de votre noyau :
# dnf search $(uname -r)Installer le paquet de correctifs en direct :
# dnf install "kpatch-patch = $(uname -r)"La commande ci-dessus installe et applique les derniers correctifs cumulatifs pour ce noyau spécifique uniquement.
Si la version d'un paquet de correctifs en direct est 1-1 ou supérieure, le paquet contiendra un module de correctifs. Dans ce cas, le noyau sera automatiquement corrigé lors de l'installation du paquet de correctifs.
Le module de correction du noyau est également installé dans le répertoire
/var/lib/kpatch/afin d'être chargé par le systèmesystemdet le gestionnaire de services lors des prochains redémarrages.NoteUn paquet de live patching vide sera installé lorsqu'il n'y a pas de live patches disponibles pour un noyau donné. Un paquet de live patching vide aura un kpatch_version-kpatch_release de 0-0, par exemple
kpatch-patch-5_14_0-1-0-0.x86_64.rpm. L'installation du RPM vide abonne le système à tous les futurs live patches pour le noyau donné.Optionnellement, vérifiez que le noyau est corrigé :
# kpatch list Loaded patch modules: kpatch_5_14_0_1_0_1 [enabled] Installed patch modules: kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64) …La sortie montre que le module de correction du noyau a été chargé dans le noyau, qui est maintenant corrigé avec les derniers correctifs du paquet
kpatch-patch-5_14_0-1-0-1.el9.x86_64.rpm.
Ressources supplémentaires
-
kpatch(1)page du manuel - Configuring basic system settings dans RHEL
16.7. Inscription automatique de tout futur noyau au flux de correctifs en direct
Vous pouvez utiliser le plugin kpatch-dnf DNF pour abonner votre système aux correctifs fournis par le module de correctifs du noyau, également connus sous le nom de "kernel live patches". Le plugin permet l'abonnement à automatic pour tout noyau que le système utilise actuellement, ainsi que pour les noyaux to-be-installed in the future.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Optionnellement, vérifiez tous les noyaux installés et le noyau que vous utilisez actuellement :
# dnf list installed | grep kernel Updating Subscription Management repositories. Installed Packages ... kernel-core.x86_64 5.14.0-1.el9 @beaker-BaseOS kernel-core.x86_64 5.14.0-2.el9 @@commandline ... # uname -r 5.14.0-2.el9.x86_64
Installez le plugin
kpatch-dnf:# dnf install kpatch-dnfActiver l'abonnement automatique aux correctifs du noyau :
# dnf kpatch auto Updating Subscription Management repositories. Last metadata expiration check: 1:38:21 ago on Fri 17 Sep 2021 07:29:53 AM EDT. Dependencies resolved. ================================================== Package Architecture ================================================== Installing: kpatch-patch-5_14_0-1 x86_64 kpatch-patch-5_14_0-2 x86_64 Transaction Summary =================================================== Install 2 Packages …Cette commande permet d'abonner tous les noyaux actuellement installés à la réception des correctifs en direct du noyau. Elle installe et applique également les derniers correctifs cumulatifs, le cas échéant, pour tous les noyaux installés.
À l'avenir, lorsque vous mettrez à jour le noyau, les correctifs seront automatiquement installés au cours de la procédure d'installation du nouveau noyau.
Le module de correction du noyau est également installé dans le répertoire
/var/lib/kpatch/afin d'être chargé par le systèmesystemdet le gestionnaire de services lors des prochains redémarrages.NoteUn paquet de live patching vide sera installé lorsqu'il n'y a pas de live patches disponibles pour un noyau donné. Un paquet de live patching vide aura un kpatch_version-kpatch_release de 0-0, par exemple
kpatch-patch-5_14_0-1-0-0.el9.x86_64.rpmL'installation du RPM vide abonne le système à tous les futurs live patches pour le noyau donné.
Étape de vérification
Vérifiez que tous les noyaux installés ont été corrigés :
# kpatch list Loaded patch modules: kpatch_5_14_0_2_0_1 [enabled] Installed patch modules: kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64) kpatch_5_14_0_2_0_1 (5.14.0-2.el9.x86_64)La sortie montre que le noyau que vous utilisez et l'autre noyau installé ont été corrigés avec des correctifs provenant respectivement des paquets
kpatch-patch-5_14_0-1-0-1.el9.x86_64.rpmetkpatch-patch-5_14_0-2-0-1.el9.x86_64.rpm.
Ressources supplémentaires
-
kpatch(1)etdnf-kpatch(8)pages de manuel - Configuring basic system settings dans RHEL
16.8. Désactivation de l'abonnement automatique au flux de correctifs en direct
Lorsque vous abonnez votre système aux correctifs fournis par le module de correctifs du noyau, votre abonnement est automatic. Vous pouvez désactiver cette fonction, et donc l'installation automatique des paquets kpatch-patch.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Optionnellement, vérifiez tous les noyaux installés et le noyau que vous utilisez actuellement :
# dnf list installed | grep kernel Updating Subscription Management repositories. Installed Packages ... kernel-core.x86_64 5.14.0-1.el9 @beaker-BaseOS kernel-core.x86_64 5.14.0-2.el9 @@commandline ... # uname -r 5.14.0-2.el9.x86_64
Désactiver l'abonnement automatique aux correctifs du noyau :
# dnf kpatch manual Updating Subscription Management repositories.
Étape de vérification
Vous pouvez vérifier si le résultat est satisfaisant :
# yum kpatch status ... Updating Subscription Management repositories. Last metadata expiration check: 0:30:41 ago on Tue Jun 14 15:59:26 2022. Kpatch update setting: manual
Ressources supplémentaires
-
kpatch(1)etdnf-kpatch(8)pages de manuel
16.9. Mise à jour des modules de correction du noyau
Étant donné que les modules de correctifs du noyau sont livrés et appliqués par le biais de paquets RPM, la mise à jour d'un module de correctifs cumulatifs du noyau est identique à celle de n'importe quel autre paquet RPM.
Conditions préalables
- Le système est abonné au flux de correctifs en direct, comme décrit dans la section Abonnement des noyaux actuellement installés au flux de correctifs en direct.
Procédure
Mise à jour vers une nouvelle version cumulative pour le noyau actuel :
# dnf update "kpatch-patch = $(uname -r)"La commande ci-dessus installe et applique automatiquement toutes les mises à jour disponibles pour le noyau en cours d'exécution. Y compris les correctifs cumulatifs live qui seront publiés ultérieurement.
Il est également possible de mettre à jour tous les modules de correction du noyau installés :
# dnf update "kpatch-patch"
Lorsque le système redémarre avec le même noyau, celui-ci est automatiquement corrigé par le service kpatch.service systemd.
Ressources supplémentaires
- Configuring basic system settings dans RHEL
16.10. Suppression du paquet de correctifs en direct
Désactivez la solution de correctifs en direct du noyau de Red Hat Enterprise Linux en supprimant le paquetage de correctifs en direct.
Conditions préalables
- Autorisations de la racine
- Le paquet de correctifs en direct est installé.
Procédure
Sélectionnez le paquet de correctifs en direct.
# dnf list installed | grep kpatch-patch kpatch-patch-5_14_0-1.x86_64 0-1.el9 @@commandline …L'exemple ci-dessus présente la liste des paquets de correctifs que vous avez installés.
Supprimez le paquet de correctifs en direct.
# dnf remove kpatch-patch-5_14_0-1.x86_64Lorsqu'un paquet de correctifs en direct est supprimé, le noyau reste corrigé jusqu'au prochain redémarrage, mais le module de correctifs du noyau est supprimé du disque. Au prochain redémarrage, le noyau correspondant ne sera plus patché.
- Redémarrez votre système.
Vérifiez que le paquet de correctifs en direct a été supprimé.
# dnf list installed | grep kpatch-patchLa commande n'affiche aucun résultat si le paquet a été supprimé avec succès.
En option, vérifiez que la solution de correctifs en direct du noyau est désactivée.
# kpatch list Loaded patch modules:L'exemple de sortie montre que le noyau n'est pas patché et que la solution de patching en direct n'est pas active parce qu'il n'y a pas de modules de patching actuellement chargés.
Actuellement, Red Hat ne prend pas en charge la réversion des correctifs en direct sans redémarrer votre système. En cas de problème, contactez notre équipe d'assistance.
Ressources supplémentaires
-
La page du manuel
kpatch(1) - Configuring basic system settings dans RHEL
16.11. Désinstallation du module de correction du noyau
Empêcher la solution de correction en direct du noyau de Red Hat Enterprise Linux d'appliquer un module de correction du noyau lors des démarrages suivants.
Conditions préalables
- Autorisations de la racine
- Un paquet de correctifs en direct est installé.
- Un module de correction du noyau est installé et chargé.
Procédure
Sélectionnez un module de correction du noyau :
# kpatch list Loaded patch modules: kpatch_5_14_0_1_0_1 [enabled] Installed patch modules: kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64) …Désinstaller le module de correction du noyau sélectionné.
# kpatch uninstall kpatch_5_14_0_1_0_1 uninstalling kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64)Notez que le module de correction du noyau désinstallé est toujours chargé :
# kpatch list Loaded patch modules: kpatch_5_14_0_1_0_1 [enabled] Installed patch modules: <NO_RESULT>
Lorsque le module sélectionné est désinstallé, le noyau reste corrigé jusqu'au prochain redémarrage, mais le module de correction du noyau est supprimé du disque.
- Redémarrez votre système.
En option, vérifiez que le module de correction du noyau a été désinstallé.
# kpatch list Loaded patch modules: …L'exemple ci-dessus ne montre aucun module de correction du noyau chargé ou installé. Le noyau n'est donc pas corrigé et la solution de correction en direct du noyau n'est pas active.
Actuellement, Red Hat ne prend pas en charge la réversion des correctifs en direct sans redémarrer votre système. En cas de problème, contactez notre équipe d'assistance.
Ressources supplémentaires
-
La page du manuel
kpatch(1)
16.12. Désactivation de kpatch.service
Empêcher la solution de correctifs en direct du noyau de Red Hat Enterprise Linux d'appliquer globalement tous les modules de correctifs du noyau lors des démarrages suivants.
Conditions préalables
- Autorisations de la racine
- Un paquet de correctifs en direct est installé.
- Un module de correction du noyau est installé et chargé.
Procédure
Vérifiez que
kpatch.serviceest activé.# systemctl is-enabled kpatch.service enabledDésactiver
kpatch.service:# systemctl disable kpatch.service Removed /etc/systemd/system/multi-user.target.wants/kpatch.service.Notez que le module de correction du noyau appliqué est toujours chargé :
# kpatch list Loaded patch modules: kpatch_5_14_0_1_0_1 [enabled] Installed patch modules: kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64)
- Redémarrez votre système.
Optionnellement, vérifiez l'état de
kpatch.service.# systemctl status kpatch.service ● kpatch.service - "Apply kpatch kernel patches" Loaded: loaded (/usr/lib/systemd/system/kpatch.service; disabled; vendor preset: disabled) Active: inactive (dead)L'exemple de sortie indique que
kpatch.servicea été désactivé et n'est pas en cours d'exécution. Par conséquent, la solution de correctifs en direct du noyau n'est pas active.Vérifiez que le module de correction du noyau a été déchargé.
# kpatch list Loaded patch modules: Installed patch modules: kpatch_5_14_0_1_0_1 (5.14.0-1.el9.x86_64)L'exemple ci-dessus montre qu'un module de correction du noyau est toujours installé mais que le noyau n'est pas corrigé.
Actuellement, Red Hat ne prend pas en charge la réversion des correctifs en direct sans redémarrer votre système. En cas de problème, contactez notre équipe d'assistance.
Ressources supplémentaires
-
La page du manuel
kpatch(1) - Configuring basic system settings dans RHEL
Chapitre 17. Utiliser systemd pour gérer les ressources utilisées par les applications
RHEL 9 déplace les paramètres de gestion des ressources du niveau du processus au niveau de l'application en liant le système de hiérarchies cgroup à l'arborescence d'unités systemd. Par conséquent, vous pouvez gérer les ressources du système à l'aide de la commande systemctl ou en modifiant les fichiers d'unité systemd.
Pour ce faire, systemd prend diverses options de configuration dans les fichiers unitaires ou directement via la commande systemctl. Ensuite, systemd applique ces options à des groupes de processus spécifiques en utilisant les appels système du noyau Linux et des fonctions telles que cgroups et namespaces.
Vous pouvez consulter l'ensemble des options de configuration pour systemd dans les pages suivantes du manuel :
-
systemd.resource-control(5) -
systemd.exec(5)
17.1. Allocation des ressources système à l'aide de systemd
Pour modifier la distribution des ressources du système, vous pouvez appliquer un ou plusieurs des modèles de distribution suivants :
- Poids
Vous pouvez distribuer la ressource en additionnant les poids de tous les sous-groupes et en donnant à chaque sous-groupe la fraction correspondant à son ratio par rapport à la somme.
Par exemple, si vous avez 10 cgroups, chacun avec un poids de valeur 100, la somme est de 1000. Chaque cgroup reçoit un dixième de la ressource.
Le poids est généralement utilisé pour distribuer des ressources sans état. Par exemple, l'option CPUWeight= est une implémentation de ce modèle de distribution des ressources.
- Limites
Un cgroup peut consommer jusqu'à la quantité configurée de la ressource. La somme des limites des sous-groupes peut dépasser la limite du cgroupe parent. Il est donc possible de surcharger les ressources dans ce modèle.
Par exemple, l'option MemoryMax= est une mise en œuvre de ce modèle de distribution des ressources.
- Protections
Vous pouvez définir une quantité protégée d'une ressource pour un cgroup. Si l'utilisation de la ressource est inférieure à la limite de protection, le noyau essaiera de ne pas pénaliser ce cgroup en faveur d'autres cgroups qui sont en concurrence pour la même ressource. Un surengagement est également possible.
Par exemple, l'option MemoryLow= est une mise en œuvre de ce modèle de distribution des ressources.
- Allocations
- Allocations exclusives d'une quantité absolue d'une ressource finie. Un surengagement n'est pas possible. Un exemple de ce type de ressource sous Linux est le budget temps réel.
- option de fichier d'unité
Paramètre de configuration du contrôle des ressources.
Par exemple, vous pouvez configurer la ressource CPU avec des options telles que CPUAccounting= ou CPUQuota=. De même, vous pouvez configurer la mémoire ou les ressources E/S avec des options telles que AllowedMemoryNodes= et IOAccounting=.
Procédure
Pour modifier la valeur requise de l'option du fichier d'unités de votre service, vous pouvez ajuster la valeur dans le fichier d'unités ou utiliser la commande systemctl:
Vérifiez les valeurs attribuées pour le service de votre choix.
# systemctl show --propriété <unit file option> <service name>
Définir la valeur requise de l'option de politique d'allocation du temps CPU :
# systemctl set-property <service name> <unit file option> =<value>
Verification steps
Vérifiez les valeurs nouvellement attribuées pour le service de votre choix.
# systemctl show --propriété <unit file option> <service name>
Ressources supplémentaires
-
systemd.resource-control(5),systemd.exec(5)pages de manuel
17.2. Rôle de systemd dans la gestion des ressources
La fonction principale de systemd est la gestion et la supervision des services. Le gestionnaire du système et des services systemd veille à ce que les services gérés démarrent au bon moment et dans le bon ordre pendant le processus de démarrage. Les services doivent fonctionner sans heurts pour utiliser de manière optimale la plate-forme matérielle sous-jacente. C'est pourquoi systemd fournit également des fonctionnalités permettant de définir des politiques de gestion des ressources et de régler diverses options susceptibles d'améliorer les performances du service.
En général, Red Hat vous recommande d'utiliser systemd pour contrôler l'utilisation des ressources du système. Vous ne devez configurer manuellement le système de fichiers virtuel cgroups que dans des cas particuliers. Par exemple, lorsque vous devez utiliser des contrôleurs cgroup-v1 qui n'ont pas d'équivalents dans la hiérarchie cgroup-v2.
17.3. Vue d'ensemble de la hiérarchie de systemd pour les cgroups
En arrière-plan, le gestionnaire de systèmes et de services systemd utilise les unités slice, scope et service pour organiser et structurer les processus dans les groupes de contrôle. Vous pouvez modifier cette hiérarchie en créant des fichiers d'unités personnalisés ou en utilisant la commande systemctl. En outre, systemd monte automatiquement les hiérarchies pour les contrôleurs de ressources importants du noyau dans le répertoire /sys/fs/cgroup/.
Trois types d'unités systemd sont utilisés pour le contrôle des ressources :
Service - Un processus ou un groupe de processus, qui
systemddémarré selon un fichier de configuration d'unité. Les services encapsulent les processus spécifiés afin qu'ils puissent être démarrés et arrêtés en tant qu'ensemble. Les services sont nommés de la manière suivante :<name>.serviceScope - Un groupe de processus créés de l'extérieur. Les portées encapsulent les processus qui sont démarrés et arrêtés par les processus arbitraires via la fonction
fork(), puis enregistrés parsystemdau moment de l'exécution. Par exemple, les sessions utilisateur, les conteneurs et les machines virtuelles sont traités comme des portées. Les champs d'application sont nommés comme suit :<name>.scopeSlice - Un groupe d'unités organisées hiérarchiquement. Les tranches organisent une hiérarchie dans laquelle sont placés les champs d'application et les services. Les processus réels sont contenus dans les scopes ou dans les services. Chaque nom d'une unité de tranche correspond au chemin d'accès à un emplacement dans la hiérarchie. Le tiret ("-") sert de séparateur entre les composants du chemin d'accès à une tranche et la tranche racine
-.slice. Dans l'exemple suivant :<parent-name>.sliceparent-name.sliceest une sous-tranche deparent.slice, qui est une sous-tranche de la tranche racine-.slice.parent-name.slicepeut avoir sa propre sous-tranche nomméeparent-name-name2.slice, et ainsi de suite.
Les unités service, scope et slice sont directement associées à des objets dans la hiérarchie du groupe de contrôle. Lorsque ces unités sont activées, elles correspondent directement aux chemins des groupes de contrôle construits à partir des noms des unités.
Voici un exemple abrégé de la hiérarchie d'un groupe de contrôle :
Control group /: -.slice ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 967 gdm-session-worker [pam/gdm-launch-environment] │ │ │ ├─1035 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart │ │ │ ├─1054 /usr/libexec/Xorg vt1 -displayfd 3 -auth /run/user/42/gdm/Xauthority -background none -noreset -keeptty -verbose 3 │ │ │ ├─1212 /usr/libexec/gnome-session-binary --autostart /usr/share/gdm/greeter/autostart │ │ │ ├─1369 /usr/bin/gnome-shell │ │ │ ├─1732 ibus-daemon --xim --panel disable │ │ │ ├─1752 /usr/libexec/ibus-dconf │ │ │ ├─1762 /usr/libexec/ibus-x11 --kill-daemon │ │ │ ├─1912 /usr/libexec/gsd-xsettings │ │ │ ├─1917 /usr/libexec/gsd-a11y-settings │ │ │ ├─1920 /usr/libexec/gsd-clipboard … ├─init.scope │ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 └─system.slice ├─rngd.service │ └─800 /sbin/rngd -f ├─systemd-udevd.service │ └─659 /usr/lib/systemd/systemd-udevd ├─chronyd.service │ └─823 /usr/sbin/chronyd ├─auditd.service │ ├─761 /sbin/auditd │ └─763 /usr/sbin/sedispatch ├─accounts-daemon.service │ └─876 /usr/libexec/accounts-daemon ├─example.service │ ├─ 929 /bin/bash /home/jdoe/example.sh │ └─4902 sleep 1 …
L'exemple ci-dessus montre que les services et les champs d'application contiennent des processus et sont placés dans des tranches qui ne contiennent pas de processus propres.
Ressources supplémentaires
- Configuring basic system settings dans Red Hat Enterprise Linux
- Que sont les contrôleurs de ressources du noyau ?
-
systemd.resource-control(5)pages du manuel,systemd.exec(5),cgroups(7),fork(),fork(2) - Comprendre les cgroups
17.4. Liste des unités systemd
Utilisez le système systemd et le gestionnaire de services pour dresser la liste de ses unités.
Procédure
Dressez la liste de toutes les unités actives du système à l'aide de la commande
# systemctl. Le terminal renverra une sortie similaire à l'exemple suivant :# systemctl UNIT LOAD ACTIVE SUB DESCRIPTION … init.scope loaded active running System and Service Manager session-2.scope loaded active running Session 2 of user jdoe abrt-ccpp.service loaded active exited Install ABRT coredump hook abrt-oops.service loaded active running ABRT kernel log watcher abrt-vmcore.service loaded active exited Harvest vmcores for ABRT abrt-xorg.service loaded active running ABRT Xorg log watcher … -.slice loaded active active Root Slice machine.slice loaded active active Virtual Machine and Container Slice system-getty.slice loaded active active system-getty.slice system-lvm2\x2dpvscan.slice loaded active active system-lvm2\x2dpvscan.slice system-sshd\x2dkeygen.slice loaded active active system-sshd\x2dkeygen.slice system-systemd\x2dhibernate\x2dresume.slice loaded active active system-systemd\x2dhibernate\x2dresume> system-user\x2druntime\x2ddir.slice loaded active active system-user\x2druntime\x2ddir.slice system.slice loaded active active System Slice user-1000.slice loaded active active User Slice of UID 1000 user-42.slice loaded active active User Slice of UID 42 user.slice loaded active active User and Session Slice …-
UNIT- un nom d'unité qui reflète également la position de l'unité dans la hiérarchie d'un groupe de contrôle. Les unités pertinentes pour le contrôle des ressources sont slice, scope et service. -
LOAD- indique si le fichier de configuration de l'unité a été correctement chargé. Si le fichier de l'unité n'a pas été chargé, le champ contient l'état error au lieu de loaded. Les autres états de chargement de l'unité sont les suivants : stub, merged, et masked. -
ACTIVE- l'état d'activation de l'unité de haut niveau, qui est une généralisation deSUB. -
SUB- l'état d'activation de l'unité de bas niveau. Les valeurs possibles dépendent du type d'unité. -
DESCRIPTION- la description du contenu et de la fonctionnalité de l'unité.
-
Liste des unités inactives.
# systemctl --allLimiter la quantité d'informations dans le résultat.
# systemctl --type service,maskedL'option
--typerequiert une liste de types d'unités séparés par des virgules, tels que service et slice, ou d'états de charge des unités, tels que loaded et masked.
Ressources supplémentaires
- Configuring basic system settings dans RHEL
-
Les pages du manuel
systemd.resource-control(5),systemd.exec(5)
17.5. Visualisation de la hiérarchie des groupes de contrôle de systemd
Afficher la hiérarchie des groupes de contrôle (cgroups) et les processus en cours d'exécution dans un site spécifique cgroups.
Procédure
Affichez l'ensemble de la hiérarchie
cgroupssur votre système à l'aide de la commandesystemd-cgls.# systemd-cgls Control group /: -.slice ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] │ │ │ ├─1040 /usr/libexec/gdm-x-session gnome-session --autostart /usr/share/gdm/greeter/autostart … ├─init.scope │ └─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 └─system.slice … ├─example.service │ ├─6882 /bin/bash /home/jdoe/example.sh │ └─6902 sleep 1 ├─systemd-journald.service └─629 /usr/lib/systemd/systemd-journald …L'exemple de sortie renvoie l'ensemble de la hiérarchie
cgroups, dont le niveau le plus élevé est formé par slices.Affichez la hiérarchie
cgroupsfiltrée par un contrôleur de ressources avec la commandesystemd-cgls <resource_controller>commande.# systemd-cgls memory Controller memory; Control group /: ├─1 /usr/lib/systemd/systemd --switched-root --system --deserialize 18 ├─user.slice │ ├─user-42.slice │ │ ├─session-c1.scope │ │ │ ├─ 965 gdm-session-worker [pam/gdm-launch-environment] … └─system.slice | … ├─chronyd.service │ └─844 /usr/sbin/chronyd ├─example.service │ ├─8914 /bin/bash /home/jdoe/example.sh │ └─8916 sleep 1 …L'exemple de sortie de la commande ci-dessus liste les services qui interagissent avec le contrôleur sélectionné.
Affichez des informations détaillées sur une unité donnée et sur sa partie de la hiérarchie
cgroupsà l'aide de la commandesystemctl status <system_unit>commande.# systemctl status example.service ● example.service - My example service Loaded: loaded (/usr/lib/systemd/system/example.service; enabled; vendor preset: disabled) Active: active (running) since Tue 2019-04-16 12:12:39 CEST; 3s ago Main PID: 17737 (bash) Tasks: 2 (limit: 11522) Memory: 496.0K (limit: 1.5M) CGroup: /system.slice/example.service ├─17737 /bin/bash /home/jdoe/example.sh └─17743 sleep 1 Apr 16 12:12:39 redhat systemd[1]: Started My example service. Apr 16 12:12:39 redhat bash[17737]: The current time is Tue Apr 16 12:12:39 CEST 2019 Apr 16 12:12:40 redhat bash[17737]: The current time is Tue Apr 16 12:12:40 CEST 2019
Ressources supplémentaires
- Que sont les contrôleurs de ressources du noyau ?
-
Les pages du manuel
systemd.resource-control(5),cgroups(7)
17.6. Visualisation des groupes de processus
La procédure suivante décrit comment savoir à quel site control group (cgroup) appartient un processus. Vous pouvez ensuite consulter le site cgroup pour connaître les contrôleurs et les configurations spécifiques qu'il utilise.
Procédure
Pour savoir à quel site
cgroupun processus appartient, exécutez la commande suivante# cat proc/<PID>/cgroupcommande :# cat /proc/2467/cgroup 0::/system.slice/example.serviceL'exemple de sortie se rapporte à un processus d'intérêt. Dans ce cas, il s'agit d'un processus identifié par
PID 2467, qui appartient à l'unitéexample.service. Vous pouvez déterminer si le processus a été placé dans un groupe de contrôle correct, tel que défini par les spécifications du fichier de l'unitésystemd.Pour afficher les contrôleurs utilisés par le site
cgroupet les fichiers de configuration correspondants, consultez le répertoirecgroup:# cat /sys/fs/cgroup/system.slice/example.service/cgroup.controllers memory pids # ls /sys/fs/cgroup/system.slice/example.service/ cgroup.controllers cgroup.events … cpu.pressure cpu.stat io.pressure memory.current memory.events … pids.current pids.events pids.max
La hiérarchie de la version 1 de cgroups utilise un modèle par contrôleur. Par conséquent, la sortie du fichier /proc/PID/cgroup indique à quel cgroups de chaque contrôleur le PID appartient. Vous pouvez trouver les cgroups correspondants dans les répertoires des contrôleurs à l'adresse suivante /sys/fs/cgroup/<controller_name>/.
Ressources supplémentaires
-
cgroups(7)page du manuel - Que sont les contrôleurs de ressources du noyau ?
-
Documentation dans le fichier
/usr/share/doc/kernel-doc-<kernel_version>/Documentation/admin-guide/cgroup-v2.rst(après l'installation du paquetkernel-doc)
17.7. Contrôle de la consommation des ressources
Affichez une liste des groupes de contrôle en cours d'exécution (cgroups) et leur consommation de ressources en temps réel.
Procédure
La commande
systemd-cgtoppermet d'afficher un compte dynamique des sites en cours d'exécution (cgroups).# systemd-cgtop Control Group Tasks %CPU Memory Input/s Output/s / 607 29.8 1.5G - - /system.slice 125 - 428.7M - - /system.slice/ModemManager.service 3 - 8.6M - - /system.slice/NetworkManager.service 3 - 12.8M - - /system.slice/accounts-daemon.service 3 - 1.8M - - /system.slice/boot.mount - - 48.0K - - /system.slice/chronyd.service 1 - 2.0M - - /system.slice/cockpit.socket - - 1.3M - - /system.slice/colord.service 3 - 3.5M - - /system.slice/crond.service 1 - 1.8M - - /system.slice/cups.service 1 - 3.1M - - /system.slice/dev-hugepages.mount - - 244.0K - - /system.slice/dev-mapper-rhel\x2dswap.swap - - 912.0K - - /system.slice/dev-mqueue.mount - - 48.0K - - /system.slice/example.service 2 - 2.0M - - /system.slice/firewalld.service 2 - 28.8M - - ...L'exemple suivant affiche les sites
cgroupsen cours d'exécution, classés en fonction de leur utilisation des ressources (CPU, mémoire, charge d'E/S sur disque). La liste est actualisée toutes les secondes par défaut. Elle offre donc un aperçu dynamique de l'utilisation réelle des ressources de chaque groupe de contrôle.
Ressources supplémentaires
-
La page du manuel
systemd-cgtop(1)
17.8. Utilisation des fichiers unitaires de systemd pour fixer des limites aux applications
Chaque unité existante ou en cours d'exécution est supervisée par systemd, qui crée également des groupes de contrôle pour ces unités. Les unités ont des fichiers de configuration dans le répertoire /usr/lib/systemd/system/. Vous pouvez modifier manuellement les fichiers d'unité pour fixer des limites, établir des priorités ou contrôler l'accès aux ressources matérielles pour des groupes de processus.
Conditions préalables
-
Vous disposez des privilèges
root.
Procédure
Modifier le fichier
/usr/lib/systemd/system/example.servicepour limiter l'utilisation de la mémoire d'un service :… [Service] MemoryMax=1500K …
La configuration ci-dessus impose une limite de mémoire maximale que les processus d'un groupe de contrôle ne peuvent pas dépasser. Le service
example.servicefait partie d'un tel groupe de contrôle auquel des limites ont été imposées. Vous pouvez utiliser les suffixes K, M, G ou T pour identifier le kilo-octet, le méga-octet, le giga-octet ou le téra-octet comme unité de mesure.Recharger tous les fichiers de configuration de l'unité :
# systemctl daemon-reloadRedémarrer le service :
# systemctl restart example.service
Vous pouvez consulter l'ensemble des options de configuration pour systemd dans les pages suivantes du manuel :
-
systemd.resource-control(5) -
systemd.exec(5)
Vérification
Vérifiez que les modifications ont bien été prises en compte :
# cat /sys/fs/cgroup/system.slice/example.service/memory.max 1536000L'exemple montre que la consommation de mémoire a été limitée à environ 1 500 Ko.
Ressources supplémentaires
- Comprendre les cgroups
- Configuring basic system settings dans Red Hat Enterprise Linux
-
systemd.resource-control(5)systemd.exec(5), pages de manuelcgroups(7)
17.9. Utilisation de la commande systemctl pour fixer des limites aux applications
Les paramètres d'affinité de l'unité centrale permettent de limiter l'accès d'un processus particulier à certaines unités centrales. En effet, le planificateur de CPU ne planifie jamais l'exécution d'un processus sur une unité centrale qui ne figure pas dans le masque d'affinité du processus.
Le masque d'affinité CPU par défaut s'applique à tous les services gérés par systemd.
Pour configurer le masque d'affinité CPU pour un service particulier systemd, systemd propose CPUAffinity= à la fois comme option de fichier d'unité et comme option de configuration de gestionnaire dans le fichier /etc/systemd/system.conf.
L'option CPUAffinity= unit file option définit une liste d'unités centrales ou de plages d'unités centrales qui sont fusionnées et utilisées comme masque d'affinité.
Après avoir configuré le masque d'affinité CPU pour un service systemd particulier, vous devez redémarrer le service pour appliquer les modifications.
Procédure
Pour définir le masque d'affinité CPU pour un service systemd particulier en utilisant l'option CPUAffinity unit file option :
Vérifiez les valeurs de l'option de fichier de l'unité
CPUAffinitydans le service de votre choix :systemctl show --property <CPU affinity configuration option> <service name>
En tant que root, définissez la valeur requise de l'option
CPUAffinityunit file pour les plages de CPU utilisées comme masque d'affinité :# systemctl set-property <service name> CPUAffinity=<value>
Redémarrez le service pour appliquer les modifications.
# systemctl restart <service name>
Vous pouvez consulter l'ensemble des options de configuration pour systemd dans les pages suivantes du manuel :
-
systemd.resource-control(5) -
systemd.exec(5)
17.10. Définition de l'affinité par défaut de l'unité centrale par le biais de la configuration du gestionnaire
Le fichier CPUAffinity option dans le fichier /etc/systemd/system.conf définit un masque d'affinité pour le numéro d'identification de processus (PID) 1 et tous les processus dérivés du PID1. Vous pouvez ensuite remplacer le fichier CPUAffinity pour chaque service.
Pour définir le masque d'affinité CPU par défaut pour tous les services systemd en utilisant l'option manager configuration:
-
Définissez les numéros de CPU pour l'option
CPUAffinity=dans le fichier/etc/systemd/system.conf. Enregistrez le fichier modifié et rechargez le service
systemd:# systemctl daemon-reload- Redémarrez le serveur pour appliquer les modifications.
Vous pouvez consulter l'ensemble des options de configuration pour systemd dans les pages suivantes du manuel :
-
systemd.resource-control(5) -
systemd.exec(5)
17.11. Configuration des politiques NUMA à l'aide de systemd
L'accès non uniforme à la mémoire (NUMA) est une conception de sous-système de mémoire d'ordinateur, dans laquelle le temps d'accès à la mémoire dépend de l'emplacement physique de la mémoire par rapport au processeur.
La mémoire proche de l'unité centrale a un temps de latence plus faible (mémoire locale) que la mémoire locale d'une autre unité centrale (mémoire étrangère) ou partagée entre plusieurs unités centrales.
En ce qui concerne le noyau Linux, la politique NUMA régit où (par exemple, sur quels nœuds NUMA) le noyau alloue des pages de mémoire physique pour le processus.
systemd fournit les options de fichier d'unité NUMAPolicy et NUMAMask pour contrôler les politiques d'allocation de mémoire pour les services.
Procédure
Pour définir la politique de mémoire NUMA à l'aide de l'option NUMAPolicy unit file option :
Vérifiez les valeurs de l'option de fichier de l'unité
NUMAPolicydans le service de votre choix :$ systemctl show --property <NUMA policy configuration option> <service name>En tant qu'utilisateur principal, définissez le type de stratégie requis pour l'option de fichier d'unité
NUMAPolicy:# systemctl set-property <service name> NUMAPolicy=<value>Redémarrez le service pour appliquer les modifications.
# systemctl restart <service name>
Pour définir un paramètre global NUMAPolicy via l'option manager configuration:
-
Recherchez l'option
NUMAPolicydans le fichier/etc/systemd/system.conf. - Modifiez le type de politique et enregistrez le fichier.
Recharger la configuration de
systemd:# systemd daemon-reload- Redémarrer le serveur.
Lorsque vous configurez une politique NUMA stricte, par exemple bind, veillez à définir également l'option de fichier d'unité CPUAffinity=.
Ressources supplémentaires
- Utilisation de la commande systemctl pour fixer des limites aux applications
-
Les pages du manuel
systemd.resource-control(5),systemd.exec(5),set_mempolicy(2).
17.12. Options de configuration de la politique NUMA pour systemd
Systemd propose les options suivantes pour configurer la politique NUMA :
NUMAPolicyContrôle la politique de mémoire NUMA des processus exécutés. Les types de politique suivants sont possibles :
- par défaut
- préférée
- lier
- entrelacement
- local
NUMAMaskContrôle la liste des nœuds NUMA associée à la politique NUMA sélectionnée.
Notez que l'option
NUMAMaskne doit pas être spécifiée pour les politiques suivantes :- par défaut
- local
Pour la stratégie préférée, la liste ne spécifie qu'un seul nœud NUMA.
Ressources supplémentaires
-
systemd.resource-control(5),systemd.exec(5), etset_mempolicy(2)pages de manuel
17.13. Création de cgroups transitoires à l'aide de la commande systemd-run
Le site transitoire cgroups fixe des limites aux ressources consommées par une unité (service ou champ d'application) pendant sa durée d'exécution.
Procédure
Pour créer un groupe de contrôle transitoire, utilisez la commande
systemd-rundans le format suivant :# systemd-run --unit=<name> --slice=<name>.slice <command>
Cette commande crée et démarre un service transitoire ou une unité d'étendue et exécute une commande personnalisée dans cette unité.
-
L'option
--unit=<name>donne un nom à l'unité. Si--unitn'est pas spécifié, le nom est généré automatiquement. -
L'option
--slice=<name>.slicefait de votre service ou de votre unité de portée un membre d'une tranche spécifiée. Remplacez<name>.slicepar le nom d'une tranche existante (comme indiqué dans la sortie desystemctl -t slice), ou créez une nouvelle tranche en indiquant un nom unique. Par défaut, les services et les champs d'application sont créés en tant que membres de la tranchesystem.slice. Remplacez
<command>par la commande que vous souhaitez exécuter dans le service ou l'unité de portée.Le message suivant s'affiche pour confirmer que vous avez créé et démarré le service ou l'étendue avec succès :
# Exécution en tant qu'unité <name>.service
-
L'option
Il est possible de laisser l'unité fonctionner après la fin de ses processus afin de collecter des informations sur l'exécution :
# systemd-run --unit=<name> --slice=<name>.slice --remain-after-exit <command>
La commande crée et démarre une unité de service transitoire et exécute une commande personnalisée dans cette unité. L'option
--remain-after-exitpermet de s'assurer que le service continue de fonctionner après la fin de ses processus.
Ressources supplémentaires
- Comprendre les groupes de contrôle
- Configuring basic system settings dans RHEL
-
la page du manuel
systemd-run(1)
17.14. Suppression des groupes de contrôle transitoires
Vous pouvez utiliser le gestionnaire de systèmes et de services systemd pour supprimer les groupes de contrôle transitoires (cgroups) si vous n'avez plus besoin de limiter, de hiérarchiser ou de contrôler l'accès aux ressources matérielles pour des groupes de processus.
Les sites transitoires cgroups sont automatiquement libérés lorsque tous les processus contenus dans un service ou une unité d'étendue sont terminés.
Procédure
Pour arrêter l'unité de service avec tous ses processus, exécutez :
# systemctl stop name .service
Pour mettre fin à un ou plusieurs processus de l'unité, exécutez :
# systemctl kill name .service --kill-who=PID,... --signal=<signal>
La commande ci-dessus utilise l'option
--kill-whopour sélectionner le(s) processus du groupe de contrôle que vous souhaitez arrêter. Pour tuer plusieurs processus en même temps, passez une liste de PIDs séparés par des virgules. L'option--signaldétermine le type de signal POSIX à envoyer aux processus spécifiés. Le signal par défaut est SIGTERM.
Ressources supplémentaires
- Comprendre les groupes de contrôle
- Que sont les contrôleurs de ressources du noyau ?
-
systemd.resource-control(5),cgroups(7)pages de manuel - Configuring basic system settings dans RHEL
Chapitre 18. Comprendre les cgroups
Vous pouvez utiliser la fonctionnalité du noyau control groups (cgroups) pour fixer des limites, établir des priorités ou isoler les ressources matérielles des processus. Cela vous permet de contrôler granulairement l'utilisation des ressources des applications afin de les utiliser plus efficacement.
18.1. Comprendre les groupes de contrôle
Control groups est une fonctionnalité du noyau Linux qui vous permet d'organiser les processus en groupes hiérarchiquement ordonnés - cgroups. La hiérarchie (arbre des groupes de contrôle) est définie en fournissant une structure au système de fichiers virtuel cgroups, monté par défaut sur le répertoire /sys/fs/cgroup/. Le gestionnaire de systèmes et de services systemd utilise cgroups pour organiser toutes les unités et tous les services qu'il régit. Vous pouvez également gérer manuellement les hiérarchies de cgroups en créant et en supprimant des sous-répertoires dans le répertoire /sys/fs/cgroup/.
Les contrôleurs de ressources (un composant du noyau) modifient alors le comportement des processus dans cgroups en limitant, en priorisant ou en allouant les ressources du système (telles que le temps de l'unité centrale, la mémoire, la largeur de bande du réseau ou diverses combinaisons) de ces processus.
La valeur ajoutée de cgroups est l'agrégation de processus qui permet de répartir les ressources matérielles entre les applications et les utilisateurs. Il est ainsi possible d'accroître l'efficacité globale, la stabilité et la sécurité de l'environnement des utilisateurs.
- Groupes de contrôle version 1
Control groups version 1 (
cgroups-v1) fournissent une hiérarchie de contrôleurs par ressource. Cela signifie que chaque ressource, telle que l'unité centrale, la mémoire, les E/S, etc., possède sa propre hiérarchie de groupes de contrôle. Il est possible de combiner différentes hiérarchies de groupes de contrôle de manière à ce qu'un contrôleur puisse coordonner avec un autre la gestion de leurs ressources respectives. Toutefois, les deux contrôleurs peuvent appartenir à des hiérarchies de processus différentes, ce qui ne permet pas une bonne coordination.Les contrôleurs
cgroups-v1ont été développés sur une longue période et, par conséquent, le comportement et la dénomination de leurs fichiers de contrôle ne sont pas uniformes.- Groupes de contrôle version 2
Les problèmes de coordination des contrôleurs, qui découlaient de la flexibilité de la hiérarchie, ont conduit au développement de control groups version 2.
Control groups version 2 (
cgroups-v2) fournit une hiérarchie de groupe de contrôle unique par rapport à laquelle tous les contrôleurs de ressources sont montés.Le comportement et la dénomination des fichiers de contrôle sont cohérents d'un contrôleur à l'autre.
Par défaut, RHEL 9 monte et utilise cgroups-v2.
Cette sous-section est basée sur une présentation de Devconf.cz 2019.[1]
Ressources supplémentaires
- Que sont les contrôleurs de ressources du noyau ?
-
cgroups(7)page du manuel - cgroups-v1
- cgroups-v2
18.2. Que sont les contrôleurs de ressources du noyau ?
La fonctionnalité des groupes de contrôle est activée par les contrôleurs de ressources du noyau. RHEL 9 prend en charge différents contrôleurs pour control groups version 1 (cgroups-v1) et control groups version 2 (cgroups-v2).
Un contrôleur de ressources, également appelé sous-système de groupe de contrôle, est un sous-système du noyau qui représente une ressource unique, telle que le temps de l'unité centrale, la mémoire, la bande passante du réseau ou les entrées/sorties du disque. Le noyau Linux fournit une gamme de contrôleurs de ressources qui sont montés automatiquement par le système systemd et le gestionnaire de services. La liste des contrôleurs de ressources actuellement montés se trouve dans le fichier /proc/cgroups.
Les contrôleurs suivants sont disponibles pour cgroups-v1:
-
blkio- peut fixer des limites à l'accès aux entrées/sorties vers et depuis les périphériques de bloc. -
cpu- peut ajuster les paramètres de l'ordonnanceur Completely Fair Scheduler (CFS) pour les tâches du groupe de contrôle. Il est monté avec le contrôleurcpuacctsur le même support. -
cpuacct- crée des rapports automatiques sur les ressources CPU utilisées par les tâches d'un groupe de contrôle. Il est monté avec le contrôleurcpusur le même support. -
cpuset- peut être utilisé pour limiter l'exécution des tâches du groupe de contrôle à un sous-ensemble spécifié de CPU et pour ordonner aux tâches d'utiliser la mémoire uniquement sur les nœuds de mémoire spécifiés. -
devices- peut contrôler l'accès aux appareils pour les tâches d'un groupe de contrôle. -
freezer- peut être utilisé pour suspendre ou reprendre des tâches dans un groupe de contrôle. -
memory- peut être utilisé pour fixer des limites à l'utilisation de la mémoire par les tâches d'un groupe de contrôle et génère des rapports automatiques sur les ressources mémoire utilisées par ces tâches. -
net_cls- marque les paquets réseau avec un identifiant de classe (classid) qui permet au contrôleur de trafic Linux (la commandetc) d'identifier les paquets qui proviennent d'une tâche de groupe de contrôle particulière. Un sous-système denet_cls,net_filter(iptables), peut également utiliser cette étiquette pour effectuer des actions sur ces paquets. Lenet_filtermarque les sockets réseau avec un identifiant de pare-feu (fwid) qui permet au pare-feu Linux (via la commandeiptables) d'identifier les paquets provenant d'une tâche particulière du groupe de contrôle. -
net_prio- définit la priorité du trafic réseau. -
pids- peut fixer des limites pour un certain nombre de processus et leurs enfants dans un groupe de contrôle. -
perf_event- peut regrouper les tâches à surveiller par l'utilitaire de surveillance des performances et de création de rapportsperf. -
rdma- peut fixer des limites aux ressources spécifiques Remote Direct Memory Access/InfiniBand dans un groupe de contrôle. -
hugetlb- peut être utilisé pour limiter l'utilisation de pages de mémoire virtuelle de grande taille par les tâches d'un groupe de contrôle.
Les contrôleurs suivants sont disponibles pour cgroups-v2:
-
io- Un suivi deblkioofcgroups-v1. -
memory- Un suivi dememoryofcgroups-v1. -
pids- Identique àpidsdanscgroups-v1. -
rdma- Identique àrdmadanscgroups-v1. -
cpu- Un suivi decpuetcpuacctdecgroups-v1. -
cpuset- Ne prend en charge que la fonctionnalité de base (cpus{,.effective},mems{,.effective}) avec une nouvelle fonction de partition. -
perf_event- La prise en charge est inhérente, il n'y a pas de fichier de contrôle explicite. Vous pouvez spécifier une adressev2 cgroupen tant que paramètre de la commandeperfqui établira le profil de toutes les tâches contenues dans cette adressecgroup.
Un contrôleur de ressources peut être utilisé soit dans une hiérarchie cgroups-v1, soit dans une hiérarchie cgroups-v2, mais pas simultanément dans les deux.
Ressources supplémentaires
-
cgroups(7)page du manuel -
Documentation dans le répertoire
/usr/share/doc/kernel-doc-<kernel_version>/Documentation/cgroups-v1/(après avoir installé le paquetagekernel-doc).
18.3. Qu'est-ce qu'un espace de noms ?
Les espaces de noms sont l'une des méthodes les plus importantes pour organiser et identifier les objets logiciels.
Un espace de noms enveloppe une ressource système globale (par exemple un point de montage, un périphérique réseau ou un nom d'hôte) dans une abstraction qui donne l'impression aux processus de l'espace de noms qu'ils ont leur propre instance isolée de la ressource globale. Les conteneurs sont l'une des technologies les plus courantes qui utilisent les espaces de noms.
Les modifications apportées à une ressource globale particulière ne sont visibles que par les processus de cet espace de noms et n'affectent pas le reste du système ou d'autres espaces de noms.
Pour savoir de quels espaces de noms un processus est membre, vous pouvez vérifier les liens symboliques dans le répertoire /proc/<PID>/ns/ dans le répertoire
Le tableau suivant présente les espaces de noms pris en charge et les ressources qu'ils isolent :
| Espace de noms | Isolats |
|---|---|
| Mount | Points de montage |
| UTS | Nom d'hôte et nom de domaine NIS |
| IPC | System V IPC, files d'attente de messages POSIX |
| PID | ID de processus |
| Network | Dispositifs de réseau, piles, ports, etc |
| User | ID d'utilisateur et de groupe |
| Control groups | Répertoire racine du groupe de contrôle |
Ressources supplémentaires
-
namespaces(7)etcgroup_namespaces(7)pages de manuel - Comprendre les groupes de contrôle
Chapitre 19. Améliorer les performances du système avec zswap
Vous pouvez améliorer les performances du système en activant la fonction du noyau zswap.
19.1. Qu'est-ce que zswap ?
zswap est une fonctionnalité du noyau qui fournit un cache RAM compressé pour les pages d'échange, ce qui peut améliorer les performances du système.
Le mécanisme fonctionne comme suit : zswap prend les pages qui sont en train d'être échangées et tente de les compresser dans un pool de mémoire RAM alloué dynamiquement. Lorsque le pool est plein ou que la RAM est épuisée, zswap expulse les pages de la mémoire cache compressée sur une base LRU (la moins récemment utilisée) vers le périphérique d'échange de sauvegarde. Une fois la page décompressée dans le cache d'échange, zswap libère la version compressée dans le pool.
- Les avantages de la
zswap - réduction significative des E/S
- amélioration significative de la performance de la charge de travail
Dans Red Hat Enterprise Linux 9, zswap est activé par défaut.
Ressources supplémentaires
19.2. Activation de zswap au moment de l'exécution
Vous pouvez activer la fonction zswap lors de l'exécution du système à l'aide de l'interface sysfs.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Activer
zswap:# echo 1 > /sys/module/zswap/parameters/enabled
Étape de vérification
Vérifiez que
zswapest activé :# grep -r . /sys/kernel/debug/zswap duplicate_entry:0 pool_limit_hit:13422200 pool_total_size:6184960 (pool size in total in pages) reject_alloc_fail:5 reject_compress_poor:0 reject_kmemcache_fail:0 reject_reclaim_fail:13422200 stored_pages:4251 (pool size after compression) written_back_pages:0
Ressources supplémentaires
19.3. Activation permanente de zswap
Vous pouvez activer la fonction zswap de manière permanente en fournissant le paramètre de ligne de commande zswap.enabled=1 kernel.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
-
L'utilitaire
grubbyouziplest installé sur votre système.
Procédure
Activer
zswapde façon permanente :# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="zswap.enabled=1"- Redémarrez le système pour que les modifications soient prises en compte.
Verification steps
Vérifiez que
zswapest activé :# cat /proc/cmdline BOOT_IMAGE=(hd0,msdos1)/vmlinuz-5.14.0-70.5.1.el9_0.x86_64 root=/dev/mapper/rhel-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet zswap.enabled=1
Ressources supplémentaires
Chapitre 20. Utilisation de cgroupfs pour gérer manuellement les cgroups
Vous pouvez gérer les hiérarchies cgroup sur votre système en créant des répertoires sur le système de fichiers virtuel cgroupfs. Le système de fichiers est monté par défaut sur le répertoire /sys/fs/cgroup/ et vous pouvez spécifier les configurations souhaitées dans des fichiers de contrôle dédiés.
En général, Red Hat vous recommande d'utiliser systemd pour contrôler l'utilisation des ressources du système. Vous ne devez configurer manuellement le système de fichiers virtuel cgroups que dans des cas particuliers. Par exemple, lorsque vous devez utiliser des contrôleurs cgroup-v1 qui n'ont pas d'équivalents dans la hiérarchie cgroup-v2.
20.1. Création de cgroups et activation de contrôleurs dans le système de fichiers cgroups-v2
Vous pouvez gérer le répertoire control groups (cgroups) en créant ou en supprimant des répertoires et en écrivant sur les fichiers du système de fichiers virtuel cgroups. Le système de fichiers est monté par défaut sur le répertoire /sys/fs/cgroup/. Pour utiliser les paramètres des contrôleurs cgroups, vous devez également activer les contrôleurs souhaités pour l'enfant cgroups. La racine cgroup a, par défaut, activé les contrôleurs memory et pids pour son enfant cgroups. Par conséquent, Red Hat recommande de créer au moins deux niveaux d'enfants cgroups à l'intérieur de la racine /sys/fs/cgroup/ cgroup . De cette manière, vous pouvez éventuellement supprimer les contrôleurs memory et pids de l'enfant cgroups et maintenir une meilleure clarté organisationnelle des fichiers cgroup.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Créez le répertoire
/sys/fs/cgroup/Example/:# mkdir /sys/fs/cgroup/Example/Le répertoire
/sys/fs/cgroup/Example/définit un groupe enfant. Lorsque vous créez le répertoire/sys/fs/cgroup/Example/, certains fichiers d'interfacecgroups-v2sont automatiquement créés dans le répertoire. Le répertoire/sys/fs/cgroup/Example/contient également des fichiers spécifiques aux contrôleursmemoryetpids.Il est possible d'inspecter le groupe de contrôle enfant nouvellement créé :
# ll /sys/fs/cgroup/Example/ -r—r—r--. 1 root root 0 Jun 1 10:33 cgroup.controllers -r—r—r--. 1 root root 0 Jun 1 10:33 cgroup.events -rw-r—r--. 1 root root 0 Jun 1 10:33 cgroup.freeze -rw-r—r--. 1 root root 0 Jun 1 10:33 cgroup.procs … -rw-r—r--. 1 root root 0 Jun 1 10:33 cgroup.subtree_control -r—r—r--. 1 root root 0 Jun 1 10:33 memory.events.local -rw-r—r--. 1 root root 0 Jun 1 10:33 memory.high -rw-r—r--. 1 root root 0 Jun 1 10:33 memory.low … -r—r—r--. 1 root root 0 Jun 1 10:33 pids.current -r—r—r--. 1 root root 0 Jun 1 10:33 pids.events -rw-r—r--. 1 root root 0 Jun 1 10:33 pids.maxL'exemple de sortie montre les fichiers généraux de l'interface de contrôle
cgrouptels quecgroup.procsoucgroup.controllers. Ces fichiers sont communs à tous les groupes de contrôle, quels que soient les contrôleurs activés.Les fichiers tels que
memory.highetpids.maxse rapportent aux contrôleursmemoryetpids, qui se trouvent dans le groupe de contrôle racine (/sys/fs/cgroup/), et sont activés par défaut parsystemd.Par défaut, le groupe enfant nouvellement créé hérite de tous les paramètres du parent
cgroup. Dans ce cas, aucune limite n'est imposée par la racinecgroup.Vérifiez que les contrôleurs souhaités sont disponibles dans le fichier
/sys/fs/cgroup/cgroup.controllers:# cat /sys/fs/cgroup/cgroup.controllers cpuset cpu io memory hugetlb pids rdmaActivez les contrôleurs souhaités. Dans cet exemple, il s'agit des contrôleurs
cpuetcpuset:# echo "+cpu" >> /sys/fs/cgroup/cgroup.subtree_control # echo "+cpuset" >> /sys/fs/cgroup/cgroup.subtree_control
Ces commandes activent les contrôleurs
cpuetcpusetpour les groupes enfants immédiats du groupe de contrôle racine/sys/fs/cgroup/. Y compris le groupe de contrôleExamplenouvellement créé. Un site child group est l'endroit où vous pouvez spécifier des processus et appliquer des contrôles à chacun des processus en fonction de vos critères.Les utilisateurs peuvent lire le contenu du fichier
cgroup.subtree_controlà n'importe quel niveau pour avoir une idée des contrôleurs qui seront disponibles pour l'activation dans le groupe enfant immédiat.NotePar défaut, le fichier
/sys/fs/cgroup/cgroup.subtree_controldu groupe de contrôle racine contient les contrôleursmemoryetpids.Activez les contrôleurs souhaités pour l'enfant
cgroupsdu groupe de contrôleExample:# echo " cpu cpuset" >> /sys/fs/cgroup/Example/cgroup.subtree_controlCette commande garantit que le groupe de contrôle enfant immédiat only aura des contrôleurs pertinents pour réguler la distribution du temps CPU - et non des contrôleurs
memoryoupids.Créez le répertoire
/sys/fs/cgroup/Example/tasks/:# mkdir /sys/fs/cgroup/Example/tasks/Le répertoire
/sys/fs/cgroup/Example/tasks/définit un groupe enfant avec des fichiers qui se rapportent uniquement aux contrôleurscpuetcpuset. Vous pouvez maintenant affecter des processus à ce groupe de contrôle et utiliser les options des contrôleurscpuetcpusetpour vos processus.Optionnellement, inspecter le groupe de contrôle de l'enfant :
# ll /sys/fs/cgroup/Example/tasks -r—r—r--. 1 root root 0 Jun 1 11:45 cgroup.controllers -r—r—r--. 1 root root 0 Jun 1 11:45 cgroup.events -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.freeze -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.max.depth -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.max.descendants -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.procs -r—r—r--. 1 root root 0 Jun 1 11:45 cgroup.stat -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.subtree_control -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.threads -rw-r—r--. 1 root root 0 Jun 1 11:45 cgroup.type -rw-r—r--. 1 root root 0 Jun 1 11:45 cpu.max -rw-r—r--. 1 root root 0 Jun 1 11:45 cpu.pressure -rw-r—r--. 1 root root 0 Jun 1 11:45 cpuset.cpus -r—r—r--. 1 root root 0 Jun 1 11:45 cpuset.cpus.effective -rw-r—r--. 1 root root 0 Jun 1 11:45 cpuset.cpus.partition -rw-r—r--. 1 root root 0 Jun 1 11:45 cpuset.mems -r—r—r--. 1 root root 0 Jun 1 11:45 cpuset.mems.effective -r—r—r--. 1 root root 0 Jun 1 11:45 cpu.stat -rw-r—r--. 1 root root 0 Jun 1 11:45 cpu.weight -rw-r—r--. 1 root root 0 Jun 1 11:45 cpu.weight.nice -rw-r—r--. 1 root root 0 Jun 1 11:45 io.pressure -rw-r—r--. 1 root root 0 Jun 1 11:45 memory.pressure
Le contrôleur cpu n'est activé que si le groupe de contrôle enfant concerné comporte au moins deux processus qui se disputent le temps d'une seule unité centrale.
Verification steps
Facultatif : confirmez que vous avez créé un nouveau site
cgroupavec uniquement les contrôleurs souhaités actifs :# cat /sys/fs/cgroup/Example/tasks/cgroup.controllers cpuset cpu
Ressources supplémentaires
- Comprendre les groupes de contrôle
- Que sont les contrôleurs de ressources du noyau ?
- Montage de cgroups-v1
-
cgroups(7),sysfs(5)pages de manuel
20.2. Contrôle de la répartition du temps d'utilisation de l'unité centrale pour les applications en ajustant le poids de l'unité centrale
Vous devez attribuer des valeurs aux fichiers pertinents du contrôleur cpu pour réguler la distribution du temps de CPU aux applications sous l'arborescence spécifique du cgroup.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
- Vous disposez d'applications pour lesquelles vous souhaitez contrôler la répartition du temps de l'unité centrale.
Vous avez créé une hiérarchie à deux niveaux de child control groups à l'intérieur de
/sys/fs/cgroup/root control group comme dans l'exemple suivant :… ├── Example │ ├── g1 │ ├── g2 │ └── g3 …
-
Vous avez activé le contrôleur
cpudans le groupe de contrôle parent et dans les groupes de contrôle enfants de la même manière que celle décrite dans la section Création de cgroups et activation de contrôleurs dans le système de fichiers cgroups-v2.
Procédure
Configurez les poids CPU souhaités afin de respecter les restrictions de ressources au sein des groupes de contrôle :
# echo "150" > /sys/fs/cgroup/Example/g1/cpu.weight # echo "100" > /sys/fs/cgroup/Example/g2/cpu.weight # echo "50" > /sys/fs/cgroup/Example/g3/cpu.weight
Ajoutez les PID des applications aux groupes enfants
g1,g2, etg3:# echo "33373" > /sys/fs/cgroup/Example/g1/cgroup.procs # echo "33374" > /sys/fs/cgroup/Example/g2/cgroup.procs # echo "33377" > /sys/fs/cgroup/Example/g3/cgroup.procs
Les commandes de l'exemple garantissent que les applications souhaitées deviennent membres des cgroups enfants
Example/g*/et que leur temps d'utilisation de l'unité centrale est réparti conformément à la configuration de ces cgroups.Les poids des cgroups enfants (
g1,g2,g3) qui ont des processus en cours sont additionnés au niveau du cgroup parent (Example). Les ressources de l'unité centrale sont ensuite réparties proportionnellement en fonction des poids respectifs.Par conséquent, lorsque tous les processus s'exécutent en même temps, le noyau alloue à chacun d'entre eux un temps d'utilisation proportionnel basé sur le fichier
cpu.weightde leur cgroupe respectif :Enfant cgroup cpu.weightfichierAttribution du temps de l'unité centrale g1
150
~50% (150/300)
g2
100
~33% (100/300)
g3
50
~16% (50/300)
La valeur du fichier du contrôleur
cpu.weightn'est pas un pourcentage.Si un processus cessait de fonctionner, laissant le cgroup
g2sans aucun processus en cours, le calcul ne tiendrait pas compte du cgroupg2et ne prendrait en compte que les poids des cgroupsg1etg3:Enfant cgroup cpu.weightfichierAttribution du temps de l'unité centrale g1
150
~75% (150/200)
g3
50
~25% (50/200)
ImportantSi un cgroup enfant a plusieurs processus en cours d'exécution, le temps CPU alloué au cgroup respectif sera distribué de manière égale aux processus membres de ce cgroup.
Vérification
Vérifiez que les applications s'exécutent dans les groupes de contrôle spécifiés :
# cat /proc/33373/cgroup /proc/33374/cgroup /proc/33377/cgroup 0::/Example/g1 0::/Example/g2 0::/Example/g3La sortie de la commande montre les processus des applications spécifiées qui s'exécutent dans les cgroups enfants
Example/g*/.Examinez la consommation actuelle de l'unité centrale des applications limitées :
# top top - 05:17:18 up 1 day, 18:25, 1 user, load average: 3.03, 3.03, 3.00 Tasks: 95 total, 4 running, 91 sleeping, 0 stopped, 0 zombie %Cpu(s): 18.1 us, 81.6 sy, 0.0 ni, 0.0 id, 0.0 wa, 0.3 hi, 0.0 si, 0.0 st MiB Mem : 3737.0 total, 3233.7 free, 132.8 used, 370.5 buff/cache MiB Swap: 4060.0 total, 4060.0 free, 0.0 used. 3373.1 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 33373 root 20 0 18720 1748 1460 R 49.5 0.0 415:05.87 sha1sum 33374 root 20 0 18720 1756 1464 R 32.9 0.0 412:58.33 sha1sum 33377 root 20 0 18720 1860 1568 R 16.3 0.0 411:03.12 sha1sum 760 root 20 0 416620 28540 15296 S 0.3 0.7 0:10.23 tuned 1 root 20 0 186328 14108 9484 S 0.0 0.4 0:02.00 systemd 2 root 20 0 0 0 0 S 0.0 0.0 0:00.01 kthread ...
NoteNous avons forcé tous les processus de l'exemple à s'exécuter sur une seule unité centrale pour une illustration plus claire. Le poids de l'unité centrale applique les mêmes principes lorsqu'il est utilisé sur plusieurs unités centrales.
Notez que la ressource CPU pour les applications
PID 33373,PID 33374etPID 33377a été allouée en fonction des poids, 150, 100, 50, que vous avez attribués aux groupes enfants respectifs. Ces poids correspondent à environ 50 %, 33 % et 16 % du temps d'utilisation de l'unité centrale pour chaque application.
Ressources supplémentaires
20.3. Montage de cgroups-v1
Au cours du processus de démarrage, RHEL 9 monte par défaut le système de fichiers virtuel cgroup-v2. Pour utiliser la fonctionnalité cgroup-v1 en limitant les ressources pour vos applications, configurez manuellement le système.
cgroup-v1 et cgroup-v2 sont tous deux pleinement activés dans le noyau. Il n'y a pas de version de groupe de contrôle par défaut du point de vue du noyau, et c'est systemd qui décide du montage au démarrage.
Conditions préalables
- Vous disposez des droits d'accès à la racine.
Procédure
Configurer le système pour qu'il monte
cgroups-v1par défaut lors du démarrage du système par le systèmesystemdet le gestionnaire de services :# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="systemd.unified_cgroup_hierarchy=0 systemd.legacy_systemd_cgroup_controller"Cette opération ajoute les paramètres de ligne de commande du noyau nécessaires à l'entrée de démarrage actuelle.
Pour ajouter les mêmes paramètres à toutes les entrées de démarrage du noyau :
# grubby --update-kernel=ALL --args="systemd.unified_cgroup_hierarchy=0 systemd.legacy_systemd_cgroup_controller"- Redémarrez le système pour que les modifications soient prises en compte.
Vérification
Optionnellement, vérifiez que le système de fichiers
cgroups-v1a été monté :# mount -l | grep cgroup tmpfs on /sys/fs/cgroup type tmpfs (ro,nosuid,nodev,noexec,seclabel,size=4096k,nr_inodes=1024,mode=755,inode64) cgroup on /sys/fs/cgroup/systemd type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,xattr,release_agent=/usr/lib/systemd/systemd-cgroups-agent,name=systemd) cgroup on /sys/fs/cgroup/perf_event type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,perf_event) cgroup on /sys/fs/cgroup/cpu,cpuacct type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,cpu,cpuacct) cgroup on /sys/fs/cgroup/pids type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,pids) cgroup on /sys/fs/cgroup/cpuset type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,cpuset) cgroup on /sys/fs/cgroup/net_cls,net_prio type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,net_cls,net_prio) cgroup on /sys/fs/cgroup/hugetlb type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,hugetlb) cgroup on /sys/fs/cgroup/memory type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,memory) cgroup on /sys/fs/cgroup/blkio type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,blkio) cgroup on /sys/fs/cgroup/devices type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,devices) cgroup on /sys/fs/cgroup/misc type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,misc) cgroup on /sys/fs/cgroup/freezer type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,freezer) cgroup on /sys/fs/cgroup/rdma type cgroup (rw,nosuid,nodev,noexec,relatime,seclabel,rdma)Les systèmes de fichiers
cgroups-v1correspondant aux différents contrôleurscgroup-v1ont été montés avec succès dans le répertoire/sys/fs/cgroup/.Il est possible d'inspecter le contenu du répertoire
/sys/fs/cgroup/:# ll /sys/fs/cgroup/ dr-xr-xr-x. 10 root root 0 Mar 16 09:34 blkio lrwxrwxrwx. 1 root root 11 Mar 16 09:34 cpu → cpu,cpuacct lrwxrwxrwx. 1 root root 11 Mar 16 09:34 cpuacct → cpu,cpuacct dr-xr-xr-x. 10 root root 0 Mar 16 09:34 cpu,cpuacct dr-xr-xr-x. 2 root root 0 Mar 16 09:34 cpuset dr-xr-xr-x. 10 root root 0 Mar 16 09:34 devices dr-xr-xr-x. 2 root root 0 Mar 16 09:34 freezer dr-xr-xr-x. 2 root root 0 Mar 16 09:34 hugetlb dr-xr-xr-x. 10 root root 0 Mar 16 09:34 memory dr-xr-xr-x. 2 root root 0 Mar 16 09:34 misc lrwxrwxrwx. 1 root root 16 Mar 16 09:34 net_cls → net_cls,net_prio dr-xr-xr-x. 2 root root 0 Mar 16 09:34 net_cls,net_prio lrwxrwxrwx. 1 root root 16 Mar 16 09:34 net_prio → net_cls,net_prio dr-xr-xr-x. 2 root root 0 Mar 16 09:34 perf_event dr-xr-xr-x. 10 root root 0 Mar 16 09:34 pids dr-xr-xr-x. 2 root root 0 Mar 16 09:34 rdma dr-xr-xr-x. 11 root root 0 Mar 16 09:34 systemdLe répertoire
/sys/fs/cgroup/, également appelé root control group, par défaut, contient des répertoires spécifiques aux contrôleurs, tels quecpuset. En outre, il existe des répertoires liés àsystemd.
Ressources supplémentaires
- Comprendre les groupes de contrôle
- Que sont les contrôleurs de ressources du noyau ?
-
cgroups(7),sysfs(5)pages de manuel - cgroup-v2 activé par défaut dans RHEL 9
20.4. Fixer des limites de CPU aux applications en utilisant cgroups-v1
Il arrive qu'une application consomme beaucoup de temps processeur, ce qui peut avoir un impact négatif sur la santé globale de votre environnement. Utilisez le système de fichiers virtuel /sys/fs/ pour configurer des limites de CPU pour une application utilisant control groups version 1 (cgroups-v1).
Conditions préalables
- Vous disposez des droits d'accès à la racine.
- Vous disposez d'une application dont vous souhaitez limiter la consommation de l'unité centrale.
Vous avez configuré le système pour qu'il monte
cgroups-v1par défaut lors du démarrage du système par le systèmesystemdet le gestionnaire de services :# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="systemd.unified_cgroup_hierarchy=0 systemd.legacy_systemd_cgroup_controller"Cette opération ajoute les paramètres de ligne de commande du noyau nécessaires à l'entrée de démarrage actuelle.
Procédure
Identifiez l'ID du processus (PID) de l'application dont vous souhaitez limiter la consommation de CPU :
# top top - 11:34:09 up 11 min, 1 user, load average: 0.51, 0.27, 0.22 Tasks: 267 total, 3 running, 264 sleeping, 0 stopped, 0 zombie %Cpu(s): 49.0 us, 3.3 sy, 0.0 ni, 47.5 id, 0.0 wa, 0.2 hi, 0.0 si, 0.0 st MiB Mem : 1826.8 total, 303.4 free, 1046.8 used, 476.5 buff/cache MiB Swap: 1536.0 total, 1396.0 free, 140.0 used. 616.4 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 6955 root 20 0 228440 1752 1472 R 99.3 0.1 0:32.71 sha1sum 5760 jdoe 20 0 3603868 205188 64196 S 3.7 11.0 0:17.19 gnome-shell 6448 jdoe 20 0 743648 30640 19488 S 0.7 1.6 0:02.73 gnome-terminal- 1 root 20 0 245300 6568 4116 S 0.3 0.4 0:01.87 systemd 505 root 20 0 0 0 0 I 0.3 0.0 0:00.75 kworker/u4:4-events_unbound ...
L'exemple de sortie du programme
toprévèle quePID 6955(application illustrativesha1sum) consomme beaucoup de ressources de l'unité centrale.Créez un sous-répertoire dans le répertoire du contrôleur de ressources
cpu:# mkdir /sys/fs/cgroup/cpu/Example/Le répertoire ci-dessus représente un groupe de contrôle, dans lequel vous pouvez placer des processus spécifiques et leur appliquer certaines limites de CPU. En même temps, certains fichiers d'interface
cgroups-v1et des fichiers spécifiques au contrôleurcpuseront créés dans le répertoire.Il est possible d'inspecter le groupe de contrôle nouvellement créé :
# ll /sys/fs/cgroup/cpu/Example/ -rw-r—r--. 1 root root 0 Mar 11 11:42 cgroup.clone_children -rw-r—r--. 1 root root 0 Mar 11 11:42 cgroup.procs -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.stat -rw-r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_all -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu_sys -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_percpu_user -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_sys -r—r—r--. 1 root root 0 Mar 11 11:42 cpuacct.usage_user -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.cfs_period_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.cfs_quota_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.rt_period_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.rt_runtime_us -rw-r—r--. 1 root root 0 Mar 11 11:42 cpu.shares -r—r—r--. 1 root root 0 Mar 11 11:42 cpu.stat -rw-r—r--. 1 root root 0 Mar 11 11:42 notify_on_release -rw-r—r--. 1 root root 0 Mar 11 11:42 tasksL'exemple de sortie montre des fichiers, tels que
cpuacct.usage,cpu.cfs._period_us, qui représentent des configurations et/ou des limites spécifiques, qui peuvent être définies pour les processus dans le groupe de contrôleExample. Notez que les noms de fichiers respectifs sont précédés du nom du contrôleur du groupe de contrôle auquel ils appartiennent.Par défaut, le groupe de contrôle nouvellement créé hérite de l'accès à l'ensemble des ressources de l'unité centrale du système, sans limite.
Configurer les limites de CPU pour le groupe de contrôle :
# echo "1000000" > /sys/fs/cgroup/cpu/Example/cpu.cfs_period_us # echo "200000" > /sys/fs/cgroup/cpu/Example/cpu.cfs_quota_us
Le fichier
cpu.cfs_period_usreprésente une période de temps en microsecondes (µs, représentée ici par "us") pour la fréquence à laquelle l'accès d'un groupe de contrôle aux ressources de l'unité centrale doit être réattribué. La limite supérieure est de 1 seconde et la limite inférieure de 1000 microsecondes.Le fichier
cpu.cfs_quota_usreprésente la durée totale en microsecondes pendant laquelle tous les processus d'un groupe de contrôle peuvent s'exécuter au cours d'une période (telle que définie parcpu.cfs_period_us). Dès que les processus d'un groupe de contrôle, au cours d'une période unique, utilisent la totalité du temps spécifié par le quota, ils sont bridés pour le reste de la période et ne sont plus autorisés à s'exécuter jusqu'à la période suivante. La limite inférieure est de 1000 microsecondes.Les exemples de commandes ci-dessus définissent les limites de temps de l'unité centrale de sorte que tous les processus du groupe de contrôle
Examplene puissent s'exécuter que pendant 0,2 seconde (définie parcpu.cfs_quota_us) sur 1 seconde (définie parcpu.cfs_period_us).Il est possible de vérifier les limites :
# cat /sys/fs/cgroup/cpu/Example/cpu.cfs_period_us /sys/fs/cgroup/cpu/Example/cpu.cfs_quota_us 1000000 200000Ajouter le PID de l'application au groupe de contrôle
Example:# echo "6955" > /sys/fs/cgroup/cpu/Example/cgroup.procs or # echo "6955" > /sys/fs/cgroup/cpu/Example/tasks
La commande précédente garantit qu'une application souhaitée devient membre du groupe de contrôle
Exampleet ne dépasse donc pas les limites de CPU configurées pour le groupe de contrôleExample. Le PID doit représenter un processus existant dans le système. L'adressePID 6955a été attribuée au processussha1sum /dev/zero &, utilisé pour illustrer le cas d'utilisation du contrôleurcpu.Vérifiez que l'application s'exécute dans le groupe de contrôle spécifié :
# cat /proc/6955/cgroup 12:cpuset:/ 11:hugetlb:/ 10:net_cls,net_prio:/ 9:memory:/user.slice/user-1000.slice/user@1000.service 8:devices:/user.slice 7:blkio:/ 6:freezer:/ 5:rdma:/ 4:pids:/user.slice/user-1000.slice/user@1000.service 3:perf_event:/ 2:cpu,cpuacct:/Example 1:name=systemd:/user.slice/user-1000.slice/user@1000.service/gnome-terminal-server.serviceL'exemple ci-dessus montre que le processus de l'application souhaitée s'exécute dans le groupe de contrôle
Example, qui applique des limites de CPU au processus de l'application.Identifiez la consommation actuelle de l'unité centrale de votre application limitée :
# top top - 12:28:42 up 1:06, 1 user, load average: 1.02, 1.02, 1.00 Tasks: 266 total, 6 running, 260 sleeping, 0 stopped, 0 zombie %Cpu(s): 11.0 us, 1.2 sy, 0.0 ni, 87.5 id, 0.0 wa, 0.2 hi, 0.0 si, 0.2 st MiB Mem : 1826.8 total, 287.1 free, 1054.4 used, 485.3 buff/cache MiB Swap: 1536.0 total, 1396.7 free, 139.2 used. 608.3 avail Mem PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND 6955 root 20 0 228440 1752 1472 R 20.6 0.1 47:11.43 sha1sum 5760 jdoe 20 0 3604956 208832 65316 R 2.3 11.2 0:43.50 gnome-shell 6448 jdoe 20 0 743836 31736 19488 S 0.7 1.7 0:08.25 gnome-terminal- 505 root 20 0 0 0 0 I 0.3 0.0 0:03.39 kworker/u4:4-events_unbound 4217 root 20 0 74192 1612 1320 S 0.3 0.1 0:01.19 spice-vdagentd ...
Remarquez que la consommation de l'unité centrale du site
PID 6955est passée de 99 % à 20 %.
La contrepartie de cgroups-v2 pour cpu.cfs_period_us et cpu.cfs_quota_us est le fichier cpu.max. Le fichier cpu.max est disponible via le contrôleur cpu.
Ressources supplémentaires
- Comprendre les groupes de contrôle
- Ce que sont les contrôleurs de ressources du noyau
-
cgroups(7),sysfs(5)pages de manuel
Chapitre 21. Analyse des performances du système avec BPF Compiler Collection
En tant qu'administrateur système, vous pouvez utiliser la bibliothèque BPF Compiler Collection (BCC) pour créer des outils d'analyse des performances de votre système d'exploitation Linux et recueillir des informations qui pourraient être difficiles à obtenir par d'autres interfaces.
21.1. Installation du paquetage bcc-tools
Installez le paquetage bcc-tools, qui installe également la bibliothèque BPF Compiler Collection (BCC) en tant que dépendance.
Procédure
Installer
bcc-tools.#dnf install bcc-toolsLes outils BCC sont installés dans le répertoire
/usr/share/bcc/tools/.Optionnellement, inspecter les outils :
#ll /usr/share/bcc/tools/... -rwxr-xr-x. 1 root root 4198 Dec 14 17:53 dcsnoop -rwxr-xr-x. 1 root root 3931 Dec 14 17:53 dcstat -rwxr-xr-x. 1 root root 20040 Dec 14 17:53 deadlock_detector -rw-r--r--. 1 root root 7105 Dec 14 17:53 deadlock_detector.c drwxr-xr-x. 3 root root 8192 Mar 11 10:28 doc -rwxr-xr-x. 1 root root 7588 Dec 14 17:53 execsnoop -rwxr-xr-x. 1 root root 6373 Dec 14 17:53 ext4dist -rwxr-xr-x. 1 root root 10401 Dec 14 17:53 ext4slower ...Le répertoire
docde la liste ci-dessus contient la documentation de chaque outil.
21.2. Utilisation de certains outils bcc pour l'analyse des performances
Utilisez certains programmes prédéfinis de la bibliothèque BPF Compiler Collection (BCC) pour analyser efficacement et en toute sécurité les performances du système au cas par cas. L'ensemble des programmes pré-créés de la bibliothèque BCC peut servir d'exemple pour la création de programmes supplémentaires.
Conditions préalables
- Installation du paquet bcc-tools
- Autorisations de la racine
Utilisation de execsnoop pour examiner les processus du système
Exécutez le programme
execsnoopdans un terminal :# /usr/share/bcc/tools/execsnoopDans un autre terminal, par exemple :
$ ls /usr/share/bcc/tools/doc/Ce qui précède crée un processus éphémère de la commande
ls.Le terminal exécutant
execsnoopaffiche une sortie similaire à la suivante :PCOMM PID PPID RET ARGS ls 8382 8287 0 /usr/bin/ls --color=auto /usr/share/bcc/tools/doc/ ...
Le programme
execsnoopimprime une ligne de sortie pour chaque nouveau processus, ce qui consomme des ressources système. Il détecte même les processus de programmes qui s'exécutent très brièvement, tels quels, et que la plupart des outils de surveillance n'enregistreraient pas.Le site
execsnoopaffiche les champs suivants :-
PCOMM - Le nom du processus parent. (
ls) -
PID - L'ID du processus. (
8382) -
PPID - L'ID du processus parent. (
8287) -
RET - La valeur de retour de l'appel système
exec()(0), qui charge le code du programme dans de nouveaux processus. - ARGS - Emplacement du programme lancé avec les arguments.
-
PCOMM - Le nom du processus parent. (
Pour plus de détails, d'exemples et d'options concernant execsnoop, consultez le fichier /usr/share/bcc/tools/doc/execsnoop_example.txt.
Pour plus d'informations sur exec(), voir les pages du manuel exec(3).
Utiliser opensnoop pour savoir quels fichiers une commande ouvre
Exécutez le programme
opensnoopdans un terminal :# /usr/share/bcc/tools/opensnoop -n unameCe qui précède imprime la sortie des fichiers qui ne sont ouverts que par le processus de la commande
uname.Dans un autre terminal, entrez :
$ unameLa commande ci-dessus ouvre certains fichiers, qui sont capturés à l'étape suivante.
Le terminal exécutant
opensnoopaffiche une sortie similaire à la suivante :PID COMM FD ERR PATH 8596 uname 3 0 /etc/ld.so.cache 8596 uname 3 0 /lib64/libc.so.6 8596 uname 3 0 /usr/lib/locale/locale-archive ...
Le programme
opensnoopsurveille l'appel systèmeopen()sur l'ensemble du système et imprime une ligne de sortie pour chaque fichier queunamea essayé d'ouvrir en cours de route.Le site
opensnoopaffiche les champs suivants :-
PID - L'ID du processus. (
8596) -
COMM - Le nom du processus. (
uname) -
FD - Le descripteur de fichier - une valeur que
open()renvoie pour faire référence au fichier ouvert. (3) - ERR - Erreurs éventuelles.
PATH - Emplacement des fichiers que
open()a tenté d'ouvrir.Si une commande tente de lire un fichier inexistant, la colonne
FDrenvoie-1et la colonneERRimprime une valeur correspondant à l'erreur en question. Par conséquent,opensnooppeut vous aider à identifier une application qui ne se comporte pas correctement.
-
PID - L'ID du processus. (
Pour plus de détails, d'exemples et d'options concernant opensnoop, consultez le fichier /usr/share/bcc/tools/doc/opensnoop_example.txt.
Pour plus d'informations sur open(), voir les pages du manuel open(2).
Utilisation de biotop pour examiner les opérations d'E/S sur le disque
Exécutez le programme
biotopdans un terminal :# /usr/share/bcc/tools/biotop 30Cette commande vous permet de surveiller les principaux processus qui effectuent des opérations d'entrée/sortie sur le disque. L'argument garantit que la commande produira un résumé de 30 secondes.
NoteSi aucun argument n'est fourni, l'écran de sortie est rafraîchi par défaut toutes les 1 secondes.
Dans un autre terminal, entrez, par exemple, :
# dd if=/dev/vda of=/dev/zeroLa commande ci-dessus lit le contenu du disque dur local et écrit la sortie dans le fichier
/dev/zero. Cette étape génère un certain trafic d'E/S pour illustrerbiotop.Le terminal exécutant
biotopaffiche une sortie similaire à la suivante :PID COMM D MAJ MIN DISK I/O Kbytes AVGms 9568 dd R 252 0 vda 16294 14440636.0 3.69 48 kswapd0 W 252 0 vda 1763 120696.0 1.65 7571 gnome-shell R 252 0 vda 834 83612.0 0.33 1891 gnome-shell R 252 0 vda 1379 19792.0 0.15 7515 Xorg R 252 0 vda 280 9940.0 0.28 7579 llvmpipe-1 R 252 0 vda 228 6928.0 0.19 9515 gnome-control-c R 252 0 vda 62 6444.0 0.43 8112 gnome-terminal- R 252 0 vda 67 2572.0 1.54 7807 gnome-software R 252 0 vda 31 2336.0 0.73 9578 awk R 252 0 vda 17 2228.0 0.66 7578 llvmpipe-0 R 252 0 vda 156 2204.0 0.07 9581 pgrep R 252 0 vda 58 1748.0 0.42 7531 InputThread R 252 0 vda 30 1200.0 0.48 7504 gdbus R 252 0 vda 3 1164.0 0.30 1983 llvmpipe-1 R 252 0 vda 39 724.0 0.08 1982 llvmpipe-0 R 252 0 vda 36 652.0 0.06 ...
Le site
biotopaffiche les champs suivants :-
PID - L'ID du processus. (
9568) -
COMM - Le nom du processus. (
dd) -
DISK - Le disque effectuant les opérations de lecture. (
vda) - I/O - Nombre d'opérations de lecture effectuées. (16294)
- Kbytes - Le nombre de Kbytes atteint par les opérations de lecture. (14,440,636)
- AVGms - Le temps d'E/S moyen des opérations de lecture. (3.69)
-
PID - L'ID du processus. (
Pour plus de détails, d'exemples et d'options concernant biotop, consultez le fichier /usr/share/bcc/tools/doc/biotop_example.txt.
Pour plus d'informations sur dd, voir les pages du manuel dd(1).
Utilisation de xfsslower pour révéler les lenteurs inattendues du système de fichiers
Exécutez le programme
xfsslowerdans un terminal :# /usr/share/bcc/tools/xfsslower 1La commande ci-dessus mesure le temps que le système de fichiers XFS passe à effectuer des opérations de lecture, d'écriture, d'ouverture ou de synchronisation (
fsync). L'argument1garantit que le programme n'affiche que les opérations qui sont plus lentes que 1 ms.NoteEn l'absence d'arguments,
xfssloweraffiche par défaut les opérations plus lentes que 10 ms.Dans un autre terminal, entrez, par exemple, ce qui suit :
$ vim textLa commande ci-dessus crée un fichier texte dans l'éditeur
vimafin d'initier certaines interactions avec le système de fichiers XFS.Le terminal qui exécute
xfssloweraffiche quelque chose de similaire après avoir sauvegardé le fichier de l'étape précédente :TIME COMM PID T BYTES OFF_KB LAT(ms) FILENAME 13:07:14 b'bash' 4754 R 256 0 7.11 b'vim' 13:07:14 b'vim' 4754 R 832 0 4.03 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 32 20 1.04 b'libgpm.so.2.1.0' 13:07:14 b'vim' 4754 R 1982 0 2.30 b'vimrc' 13:07:14 b'vim' 4754 R 1393 0 2.52 b'getscriptPlugin.vim' 13:07:45 b'vim' 4754 S 0 0 6.71 b'text' 13:07:45 b'pool' 2588 R 16 0 5.58 b'text' ...
Chaque ligne ci-dessus représente une opération dans le système de fichiers qui a pris plus de temps qu'un certain seuil.
xfsslowerest capable d'exposer les problèmes éventuels du système de fichiers, qui peuvent prendre la forme d'opérations inopinément lentes.Le site
xfssloweraffiche les champs suivants :-
COMM - Le nom du processus. (
b’bash') T - Le type d'opération. (
R)- Rtête
- Write
- Sync
- OFF_KB - Le décalage du fichier en Ko. (0)
- FILENAME - Le fichier en cours de lecture, d'écriture ou de synchronisation.
-
COMM - Le nom du processus. (
Pour plus de détails, d'exemples et d'options concernant xfsslower, consultez le fichier /usr/share/bcc/tools/doc/xfsslower_example.txt.
Pour plus d'informations sur fsync, voir les pages du manuel fsync(2).
Chapitre 22. Renforcer la sécurité avec le sous-système d'intégrité du noyau
Vous pouvez améliorer la protection de votre système en utilisant les composants du sous-système d'intégrité du noyau. En savoir plus sur les composants concernés et leur configuration.
Vous pouvez utiliser les fonctionnalités avec des signatures cryptographiques uniquement pour les produits Red Hat car le système de trousseau de clés du noyau inclut uniquement les certificats pour les clés de signature Red Hat. L'utilisation d'autres fonctions de hachage entraîne une inviolabilité incomplète.
22.1. Le sous-système d'intégrité du noyau
Le sous-système d'intégrité est la partie du noyau qui maintient l'intégrité globale des données du système. Ce sous-système permet de conserver l'état d'un système tel qu'il était au moment de sa construction. En utilisant ce sous-système, vous pouvez empêcher toute modification indésirable de fichiers système spécifiques.
Le sous-système d'intégrité du noyau se compose de deux éléments principaux :
- Architecture de mesure de l'intégrité (IMA)
- L'IMA mesure le contenu des fichiers à chaque fois qu'ils sont exécutés ou ouverts en les hachant ou en les signant à l'aide de clés cryptographiques. Les clés sont stockées dans le sous-système du trousseau du noyau.
- L'IMA place les valeurs mesurées dans l'espace mémoire du noyau. Cela empêche les utilisateurs du système de modifier les valeurs mesurées.
- L'IMA permet aux parties locales et distantes de vérifier les valeurs mesurées.
- IMA permet de valider localement le contenu actuel des fichiers par rapport aux valeurs précédemment stockées dans la liste de mesures de la mémoire du noyau. Cette extension interdit toute opération sur un fichier spécifique si les mesures actuelles et précédentes ne correspondent pas.
- Module de vérification étendu (EVM)
- L'EVM protège les attributs étendus des fichiers (également connus sous le nom de xattr) qui sont liés à la sécurité du système, tels que les mesures IMA et les attributs SELinux. L'EVM procède au hachage cryptographique des valeurs correspondantes ou les signe à l'aide de clés cryptographiques. Les clés sont stockées dans le sous-système du trousseau de clés du noyau.
Le sous-système d'intégrité du noyau peut utiliser le Trusted Platform Module (TPM) pour renforcer encore la sécurité du système.
Un TPM est un composant matériel, micrologiciel ou virtuel avec des clés cryptographiques intégrées, qui est construit conformément à la spécification TPM du Trusted Computing Group (TCG) pour les fonctions cryptographiques importantes. Les TPM sont généralement construits comme du matériel dédié attaché à la carte mère de la plateforme. En fournissant des fonctions cryptographiques à partir d'une zone protégée et inviolable de la puce matérielle, les TPM sont protégés contre les attaques logicielles. Les MPT présentent les caractéristiques suivantes :
- Générateur de nombres aléatoires
- Générateur et stockage sécurisé de clés cryptographiques
- Générateur de hachage
- Attestation à distance
Ressources supplémentaires
22.2. Des clés fiables et cryptées
Trusted keys et encrypted keys sont des éléments importants du renforcement de la sécurité des systèmes.
Les clés de confiance et les clés cryptées sont des clés symétriques de longueur variable générées par le noyau qui utilisent le service de trousseau du noyau. L'intégrité des clés peut être vérifiée, ce qui signifie qu'elles peuvent être utilisées, par exemple, par le module de vérification étendu (EVM) pour vérifier et confirmer l'intégrité d'un système en cours d'exécution. Les programmes de niveau utilisateur ne peuvent accéder aux clés que sous la forme d'informations chiffrées ( blobs).
- Clés de confiance
Les clés de confiance nécessitent la puce du module de plate-forme de confiance (TPM), qui est utilisée pour créer et crypter (sceller) les clés. Chaque TPM possède une clé d'enveloppement principale, appelée clé racine de stockage, qui est stockée dans le TPM lui-même.
NoteRHEL 9 ne prend en charge que TPM 2.0. Si vous devez utiliser TPM 1.2, utilisez RHEL 8. Pour plus d'informations, consultez la solution Le Trusted Platform Module (TPM) est-il pris en charge par Red Hat ?
Vous pouvez vérifier qu'une puce TPM 2.0 a été activée en entrant la commande suivante :
$ cat /sys/class/tpm/tpm0/tpm_version_major 2Vous pouvez également activer une puce TPM 2.0 et gérer le dispositif TPM 2.0 par le biais de paramètres dans le micrologiciel de la machine.
En outre, vous pouvez sceller les clés de confiance avec un ensemble spécifique de valeurs du TPM platform configuration register (PCR). Le PCR contient un ensemble de valeurs de gestion de l'intégrité qui reflètent le micrologiciel, le chargeur de démarrage et le système d'exploitation. Cela signifie que les clés scellées par PCR ne peuvent être décryptées par le TPM que sur le même système que celui sur lequel elles ont été cryptées. Toutefois, lorsqu'une clé de confiance scellée par PCR est chargée (ajoutée à un trousseau) et que les valeurs PCR qui lui sont associées sont vérifiées, elle peut être mise à jour avec de nouvelles (ou futures) valeurs PCR, de sorte qu'un nouveau noyau, par exemple, puisse être démarré. Vous pouvez également enregistrer une seule clé sous la forme de plusieurs blobs, chacun avec une valeur PCR différente.
- Clés cryptées
- Les clés chiffrées ne nécessitent pas de MPT, car elles utilisent la norme de chiffrement avancé (AES) du noyau, ce qui les rend plus rapides que les clés de confiance. Les clés chiffrées sont créées à l'aide de nombres aléatoires générés par le noyau et chiffrées par master key lorsqu'elles sont exportées dans des blobs de l'espace utilisateur.
La clé principale est soit une clé de confiance, soit une clé d'utilisateur. Si la clé principale n'est pas de confiance, la clé cryptée n'est aussi sûre que la clé utilisateur utilisée pour la crypter.
22.3. Travailler avec des clés de confiance
Vous pouvez améliorer la sécurité du système en utilisant l'utilitaire keyctl pour créer, exporter, charger et mettre à jour les clés de confiance.
Conditions préalables
Le module de plate-forme de confiance (TPM) est activé et actif. Voir Sous-système d'intégrité du noyau et Clés de confiance et chiffrées.
Vous pouvez vérifier que votre système dispose d'un TPM en entrant la commande
tpm2_pcrread. Si la sortie de cette commande affiche plusieurs hachages, vous disposez d'un TPM.
Procédure
Créez une clé RSA de 2048 bits avec une clé de stockage primaire SHA-256 avec une poignée persistante, par exemple, 81000001, en utilisant l'un des utilitaires suivants :
En utilisant le paquet
tss2:# TPM_DEVICE=/dev/tpm0 tsscreateprimary -hi o -st Handle 80000000 # TPM_DEVICE=/dev/tpm0 tssevictcontrol -hi o -ho 80000000 -hp 81000001
En utilisant le paquet
tpm2-tools:# tpm2_createprimary --key-algorithm=rsa2048 --key-context=key.ctxt name-alg: value: sha256 raw: 0xb … sym-keybits: 128 rsa: xxxxxx… # tpm2_evictcontrol -c key.ctxt 0x81000001 persistentHandle: 0x81000001 action: persisted
Créez une clé de confiance en utilisant un TPM 2.0 avec la syntaxe suivante
keyctl add trusted <NAME> "new <KEY_LENGTH> keyhandle=<PERSISTENT-HANDLE> [options]" <KEYRING>. Dans cet exemple, la poignée persistante est 81000001.# keyctl add trusted kmk "new 32 keyhandle=0x81000001" @u 642500861La commande crée une clé de confiance appelée
kmkd'une longueur de32octets (256 bits) et la place dans le trousseau de l'utilisateur (@u). Les clés peuvent avoir une longueur de 32 à 128 octets (256 à 1024 bits).Liste la structure actuelle des trousseaux de clés du noyau.
# keyctl show Session Keyring -3 --alswrv 500 500 keyring: ses 97833714 --alswrv 500 -1 \ keyring: uid.1000 642500861 --alswrv 500 500 \ trusted: kmk
Exporter la clé vers un blob de l'espace utilisateur en utilisant le numéro de série de la clé de confiance.
# keyctl pipe 642500861 > kmk.blobLa commande utilise la sous-commande
pipeet le numéro de sériekmk.Charger la clé de confiance à partir du blob de l'espace utilisateur.
# keyctl add trusted kmk "load `cat kmk.blob`" @u 268728824Créez des clés cryptées sécurisées qui utilisent la clé de confiance scellée par le TPM (
kmk). Suivez la syntaxe suivante : keyctl add encrypted <NAME> "new [FORMAT] <KEY_TYPE>:<PRIMARY_KEY_NAME> <KEY_LENGTH>" <KEYRING>.# keyctl add encrypted encr-key "new trusted:kmk 32" @u 159771175
Ressources supplémentaires
-
la page du manuel
keyctl(1) - Des clés fiables et cryptées
- Service de conservation des clés du noyau
- Le sous-système d'intégrité du noyau
22.4. Travailler avec des clés cryptées
Vous pouvez améliorer la sécurité du système sur les systèmes qui ne disposent pas d'un module de plate-forme de confiance (TPM) en gérant des clés cryptées.
Procédure
Générer une clé d'utilisateur en utilisant une séquence aléatoire de nombres.
# keyctl add user kmk-user "$(dd if=/dev/urandom bs=1 count=32 2>/dev/null)" @u 427069434La commande génère une clé d'utilisateur appelée
kmk-userqui fait office de primary key et est utilisée pour sceller les clés cryptées proprement dites.Générer une clé cryptée en utilisant la clé primaire de l'étape précédente :
# keyctl add encrypted encr-key "new user:kmk-user 32" @u 1012412758Optionnellement, liste de toutes les clés du trousseau de l'utilisateur spécifié :
# keyctl list @u 2 keys in keyring: 427069434: --alswrv 1000 1000 user: kmk-user 1012412758: --alswrv 1000 1000 encrypted: encr-key
Les clés chiffrées qui ne sont pas scellées par une clé primaire de confiance ne sont aussi sûres que la clé primaire de l'utilisateur (clé de nombres aléatoires) qui a été utilisée pour les chiffrer. Par conséquent, chargez la clé primaire de l'utilisateur de la manière la plus sûre possible et, de préférence, au début du processus de démarrage.
Ressources supplémentaires
-
La page du manuel
keyctl(1) - Service de conservation des clés du noyau
22.5. Permettre l'IMA et l'EVM
Vous pouvez activer et configurer l'architecture de mesure de l'intégrité (IMA) et le module de vérification étendu (EVM) pour améliorer la sécurité du système d'exploitation.
Conditions préalables
Secure Boot est temporairement désactivé.
NoteLorsque l'option Secure Boot est activée, le paramètre de ligne de commande
ima_appraise=fixkernel ne fonctionne pas.Le système de fichiers
securityfsest monté sur le répertoire/sys/kernel/security/et le répertoire/sys/kernel/security/integrity/ima/existe. Vous pouvez vérifier oùsecurityfsest monté en utilisant la commandemount:# mount ... securityfs on /sys/kernel/security type securityfs (rw,nosuid,nodev,noexec,relatime) ...Le gestionnaire de services
systemdest corrigé pour prendre en charge l'IMA et l'EVM au démarrage. Vous pouvez le vérifier en utilisant la commande suivante :# dmesg | grep -i -e EVM -e IMA [ 0.000000] Command line: BOOT_IMAGE=(hd0,msdos1)/vmlinuz-5.14.0-1.el9.x86_64 root=/dev/mapper/rhel-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet [ 0.000000] kvm-clock: cpu 0, msr 23601001, primary cpu clock [ 0.000000] Using crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M, the size chosen is a best effort estimation. [ 0.000000] Kernel command line: BOOT_IMAGE=(hd0,msdos1)/vmlinuz-5.14.0-1.el9.x86_64 root=/dev/mapper/rhel-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet [ 0.911527] ima: No TPM chip found, activating TPM-bypass! [ 0.911538] ima: Allocated hash algorithm: sha1 [ 0.911580] evm: Initialising EVM extended attributes: [ 0.911581] evm: security.selinux [ 0.911581] evm: security.ima [ 0.911582] evm: security.capability [ 0.911582] evm: HMAC attrs: 0x1 [ 1.715151] systemd[1]: systemd 239 running in system mode. (+PAM +AUDIT +SELINUX +IMA -APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ +LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD +IDN2 -IDN +PCRE2 default-hierarchy=legacy) [ 3.824198] fbcon: qxldrmfb (fb0) is primary device [ 4.673457] PM: Image not found (code -22) [ 6.549966] systemd[1]: systemd 239 running in system mode. (+PAM +AUDIT +SELINUX +IMA -APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ +LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD +IDN2 -IDN +PCRE2 default-hierarchy=legacy)
Procédure
Activez l'IMA et l'EVM dans le mode fix pour l'entrée de démarrage actuelle et permettez aux utilisateurs de recueillir et de mettre à jour les mesures IMA en ajoutant les paramètres de ligne de commande du noyau suivants :
# grubby --update-kernel=/boot/vmlinuz-$(uname -r) --args="ima_policy=appraise_tcb ima_appraise=fix evm=fix"La commande active l'IMA et l'EVM dans le mode fix pour l'entrée de démarrage actuelle et permet aux utilisateurs de rassembler et de mettre à jour les mesures IMA.
Le paramètre de ligne de commande du noyau
ima_policy=appraise_tcbgarantit que le noyau utilise la politique de mesure par défaut de la Trusted Computing Base (TCB) et l'étape d'évaluation. L'étape d'évaluation interdit l'accès aux fichiers dont les mesures antérieures et actuelles ne correspondent pas.- Redémarrez pour que les modifications soient prises en compte.
Facultatif : Vérifiez que les paramètres ont été ajoutés à la ligne de commande du noyau :
# cat /proc/cmdline BOOT_IMAGE=(hd0,msdos1)/vmlinuz-5.14.0-1.el9.x86_64 root=/dev/mapper/rhel-root ro crashkernel=1G-4G:192M,4G-64G:256M,64G-:512M resume=/dev/mapper/rhel-swap rd.lvm.lv=rhel/root rd.lvm.lv=rhel/swap rhgb quiet ima_policy=appraise_tcb ima_appraise=fix evm=fixCréer une clé maître du noyau pour protéger la clé EVM :
# keyctl add user kmk "$(dd if=/dev/urandom bs=1 count=32 2> /dev/null)" @u 748544121L'adresse
kmkest entièrement conservée dans la mémoire du noyau. La valeur de 32 octets dekmkest générée à partir d'octets aléatoires du fichier/dev/urandomet placée dans le trousseau de l'utilisateur (@u). Le numéro de série de la clé se trouve sur la première ligne de la sortie précédente.Créer une clé EVM cryptée sur la base du site
kmk:# keyctl add encrypted evm-key "new user:kmk 64" @u 641780271La commande utilise le site
kmkpour générer et crypter une clé d'utilisateur de 64 octets (nomméeevm-key) et la placer dans le trousseau de l'utilisateur (@u). Le numéro de série de la clé se trouve sur la première ligne de la sortie précédente.ImportantIl est nécessaire de nommer la clé utilisateur evm-key car c'est le nom que le sous-système EVM attend et avec lequel il travaille.
Créer un répertoire pour les clés exportées.
# mkdir -p /etc/keys/Recherchez le site
kmket exportez sa valeur en clair dans le nouveau répertoire.# keyctl pipe $(keyctl search @u user kmk) > /etc/keys/kmkRecherchez le site
evm-keyet exportez sa valeur cryptée dans le nouveau répertoire.# keyctl pipe $(keyctl search @u encrypted evm-key) > /etc/keys/evm-keyLe site
evm-keya été crypté précédemment par la clé principale du noyau.Optionnel : Affichez les clés nouvellement créées.
# keyctl show Session Keyring 974575405 --alswrv 0 0 keyring: ses 299489774 --alswrv 0 65534 \ keyring: uid.0 748544121 --alswrv 0 0 \ user: kmk 641780271 --alswrv 0 0 \_ encrypted: evm-key # ls -l /etc/keys/ total 8 -rw-r--r--. 1 root root 246 Jun 24 12:44 evm-key -rw-r--r--. 1 root root 32 Jun 24 12:43 kmk
Facultatif : si les clés ont été supprimées du trousseau, par exemple après un redémarrage du système, vous pouvez importer les clés déjà exportées
kmketevm-keyau lieu d'en créer de nouvelles.Importer le site
kmk.# keyctl add user kmk "$(cat /etc/keys/kmk)" @u 451342217Importer le site
evm-key.# keyctl add encrypted evm-key "load $(cat /etc/keys/evm-key)" @u 924537557
Activer l'EVM.
# echo 1 > /sys/kernel/security/evmRéétiqueter l'ensemble du système.
# find / -fstype xfs -type f -uid 0 -exec head -n 1 '{}' >/dev/null \;AvertissementL'activation de l'IMA et de l'EVM sans réétiquetage du système peut rendre la majorité des fichiers du système inaccessibles.
Vérification
Vérifiez que l'EVM a été initialisé.
# dmesg | tail -1 […] evm: key initialized
Ressources supplémentaires
22.6. Collecte de hachages de fichiers avec une architecture de mesure de l'intégrité
Dans la phase measurement, vous pouvez créer des hachages de fichiers et les stocker en tant qu'attributs étendus (xattrs) de ces fichiers. Avec les hachages de fichiers, vous pouvez générer une signature numérique basée sur RSA ou un code d'authentification de message basé sur le hachage (HMAC-SHA1) et ainsi empêcher les attaques de falsification hors ligne sur les attributs étendus.
Conditions préalables
- L'IMA et l'EVM sont activés. Pour plus d'informations, voir Activation de l'architecture de mesure de l'intégrité et du module de vérification étendu.
- Une clé de confiance valide ou une clé cryptée est stockée dans le trousseau de clés du noyau.
-
Les paquets
ima-evm-utils,attr, etkeyutilssont installés.
Procédure
Créer un fichier de test.
# echo <Test_text> > test_fileL'IMA et l'EVM garantissent que le fichier d'exemple
test_filea des valeurs de hachage attribuées qui sont stockées en tant qu'attributs étendus.Inspecter les attributs étendus du fichier.
# getfattr -m . -d test_file # file: test_file security.evm=0sAnDIy4VPA0HArpPO/EqiutnNyBql security.ima=0sAQOEDeuUnWzwwKYk+n66h/vby3eD
L'exemple de sortie montre des attributs étendus avec les valeurs de hachage de l'IMA et de l'EVM et le contexte SELinux. EVM ajoute un attribut étendu
security.evmlié aux autres attributs. À ce stade, vous pouvez utiliser l'utilitaireevmctlsursecurity.evmpour générer une signature numérique basée sur RSA ou un code d'authentification de message basé sur le hachage (HMAC-SHA1).
Ressources supplémentaires
Chapitre 23. Configuration permanente des paramètres du noyau à l'aide de kernel_settings RHEL System Role
Vous pouvez utiliser le rôle kernel_settings pour configurer les paramètres du noyau sur plusieurs clients à la fois. Cette solution :
- Fournit une interface conviviale avec des paramètres d'entrée efficaces.
- Conserve tous les paramètres du noyau en un seul endroit.
Après avoir exécuté le rôle kernel_settings à partir de la machine de contrôle, les paramètres du noyau sont appliqués immédiatement aux systèmes gérés et persistent à travers les redémarrages.
Notez que les rôles système RHEL livrés sur les canaux RHEL sont disponibles pour les clients RHEL sous forme de paquetage RPM dans le référentiel AppStream par défaut. Les rôles système RHEL sont également disponibles sous forme de collection pour les clients ayant des abonnements Ansible via Ansible Automation Hub.
23.1. Introduction au rôle kernel_settings
RHEL System Roles est un ensemble de rôles qui fournit une interface de configuration cohérente pour gérer à distance plusieurs systèmes.
Les rôles système RHEL ont été introduits pour les configurations automatisées du noyau à l'aide du rôle système kernel_settings. Le paquet rhel-system-roles contient ce rôle système, ainsi que la documentation de référence.
Pour appliquer les paramètres du noyau sur un ou plusieurs systèmes de manière automatisée, utilisez le rôle kernel_settings avec une ou plusieurs de ses variables de rôle de votre choix dans un playbook. Un playbook est une liste d'un ou plusieurs jeux lisibles par l'homme et écrits au format YAML.
Le rôle kernel_settings vous permet de configurer :
-
Les paramètres du noyau en utilisant la variable de rôle
kernel_settings_sysctl -
Divers sous-systèmes du noyau, périphériques matériels et pilotes de périphériques utilisant la variable de rôle
kernel_settings_sysfs -
L'affinité du processeur pour le gestionnaire de service
systemdet les processus qui en découlent en utilisant la variable de rôlekernel_settings_systemd_cpu_affinity -
Le sous-système de mémoire du noyau utilise les variables de rôle
kernel_settings_transparent_hugepagesetkernel_settings_transparent_hugepages_defragpour rendre les hugepages transparentes
Ressources supplémentaires
-
README.mdetREADME.htmldans le répertoire/usr/share/doc/rhel-system-roles/kernel_settings/ - Travailler avec des playbooks
- Comment constituer votre inventaire
23.2. Application des paramètres sélectionnés du noyau à l'aide du rôle kernel_settings
Suivez ces étapes pour préparer et appliquer un playbook Ansible afin de configurer à distance les paramètres du noyau avec un effet persistant sur plusieurs systèmes d'exploitation gérés.
Conditions préalables
-
Vous avez les autorisations
root. -
En vertu de votre abonnement RHEL, vous avez installé les paquets
ansible-coreetrhel-system-rolessur la machine de contrôle. - Un inventaire des hôtes gérés est présent sur la machine de contrôle et Ansible peut s'y connecter.
RHEL 8.0 - 8.5 donne accès à un dépôt Ansible séparé qui contient Ansible Engine 2.9 pour l'automatisation basée sur Ansible. Ansible Engine contient des utilitaires de ligne de commande tels que ansible, ansible-playbook; des connecteurs tels que docker et podman; et tout l'univers des plugins et des modules. Pour plus d'informations sur la manière d'obtenir et d'installer Ansible Engine, reportez-vous à la section Comment télécharger et installer Red Hat Ansible Engine ?
RHEL 8.6 et 9.0 a introduit Ansible Core (fourni en tant que ansible-core RPM), qui contient les utilitaires de ligne de commande Ansible, les commandes et un petit ensemble de plugins Ansible intégrés. Le dépôt AppStream fournit ansible-core, qui a une portée de support limitée. Pour en savoir plus, consultez le document Scope of support for the ansible-core package included in the RHEL 9 AppStream.
Procédure
Si vous le souhaitez, vous pouvez consulter le fichier
inventoryà des fins d'illustration :# cat /home/jdoe/<ansible_project_name>/inventory [testingservers] pdoe@192.168.122.98 fdoe@192.168.122.226 [db-servers] db1.example.com db2.example.com [webservers] web1.example.com web2.example.com 192.0.2.42Ce fichier définit le groupe
[testingservers]et d'autres groupes. Il vous permet d'exécuter Ansible plus efficacement sur un ensemble spécifique de systèmes.Créer un fichier de configuration pour définir les valeurs par défaut et l'escalade des privilèges pour les opérations Ansible.
Créez un nouveau fichier YAML et ouvrez-le dans un éditeur de texte, par exemple :
# vi /home/jdoe/<ansible_project_name>/ansible.cfgInsérez le contenu suivant dans le fichier :
[defaults] inventory = ./inventory [privilege_escalation] become = true become_method = sudo become_user = root become_ask_pass = true
La section
[defaults]indique un chemin d'accès au fichier d'inventaire des hôtes gérés. La section[privilege_escalation]définit que les privilèges de l'utilisateur doivent passer àrootsur les hôtes gérés spécifiés. Ceci est nécessaire pour une configuration réussie des paramètres du noyau. Lorsque le playbook Ansible est exécuté, vous serez invité à saisir le mot de passe de l'utilisateur. L'utilisateur passe automatiquement àrootpar le biais desudoaprès s'être connecté à un hôte géré.
Créer un playbook Ansible qui utilise le rôle
kernel_settings.Créez un nouveau fichier YAML et ouvrez-le dans un éditeur de texte, par exemple :
# vi /home/jdoe/<ansible_project_name>/kernel-roles.ymlCe fichier représente un playbook et contient généralement une liste ordonnée de tâches, également appelées plays, qui sont exécutées contre des hôtes gérés spécifiques sélectionnés dans votre fichier
inventory.Insérez le contenu suivant dans le fichier :
--- - hosts: testingservers name: "Configure kernel settings" roles: - rhel-system-roles.kernel_settings vars: kernel_settings_sysctl: - name: fs.file-max value: 400000 - name: kernel.threads-max value: 65536 kernel_settings_sysfs: - name: /sys/class/net/lo/mtu value: 65000 kernel_settings_transparent_hugepages: madviseLa clé
nameest facultative. Elle associe une chaîne arbitraire à la pièce en tant qu'étiquette et identifie l'objet de la pièce. La cléhostsde la pièce spécifie les hôtes contre lesquels la pièce est exécutée. La ou les valeurs de cette clé peuvent être fournies sous forme de noms individuels d'hôtes gérés ou de groupes d'hôtes tels que définis dans le fichierinventory.La section
varsreprésente une liste de variables contenant les noms des paramètres du noyau sélectionnés et les valeurs auxquelles ils doivent être définis.La clé
rolesspécifie le rôle du système qui va configurer les paramètres et les valeurs mentionnés dans la sectionvars.NoteVous pouvez modifier les paramètres du noyau et leurs valeurs dans le playbook en fonction de vos besoins.
En option, vérifiez que la syntaxe de votre pièce est correcte.
# ansible-playbook --syntax-check kernel-roles.yml playbook: kernel-roles.ymlCet exemple montre la vérification réussie d'un playbook.
Exécutez votre cahier des charges.
# ansible-playbook kernel-roles.yml ... BECOME password: PLAY [Configure kernel settings] ********************************************************************************** PLAY RECAP ******************************************************************************************************** fdoe@192.168.122.226 : ok=10 changed=4 unreachable=0 failed=0 skipped=6 rescued=0 ignored=0 pdoe@192.168.122.98 : ok=10 changed=4 unreachable=0 failed=0 skipped=6 rescued=0 ignored=0Avant qu'Ansible n'exécute votre playbook, vous allez être invité à saisir votre mot de passe afin qu'un utilisateur sur les hôtes gérés puisse être basculé sur
root, ce qui est nécessaire pour configurer les paramètres du noyau.La section récapitulative montre que la lecture s'est terminée avec succès (
failed=0) pour tous les hôtes gérés, et que 4 paramètres du noyau ont été appliqués (changed=4).- Redémarrez les hôtes gérés et vérifiez les paramètres du noyau concernés pour vous assurer que les changements ont été appliqués et qu'ils persistent après les redémarrages.
Ressources supplémentaires
- Préparation d'un nœud de contrôle et de nœuds gérés à l'utilisation des rôles système RHEL
-
README.htmletREADME.mddans le répertoire/usr/share/doc/rhel-system-roles/kernel_settings/ - Constituez votre inventaire
- Configuration d'Ansible
- Travailler avec des Playbooks
- Utilisation de variables
- Rôles